Onboard sensing in robotics involves integrating sensors directly into the robot to collect real-time data for immediate processing and decision-making, enhancing autonomy and responsiveness. Remote sensing relies on external devices or systems to gather information about the robot's environment, enabling broader situational awareness and reduced onboard processing requirements. Balancing onboard and remote sensing techniques optimizes robot performance across navigation, obstacle detection, and environmental interaction.
Table of Comparison
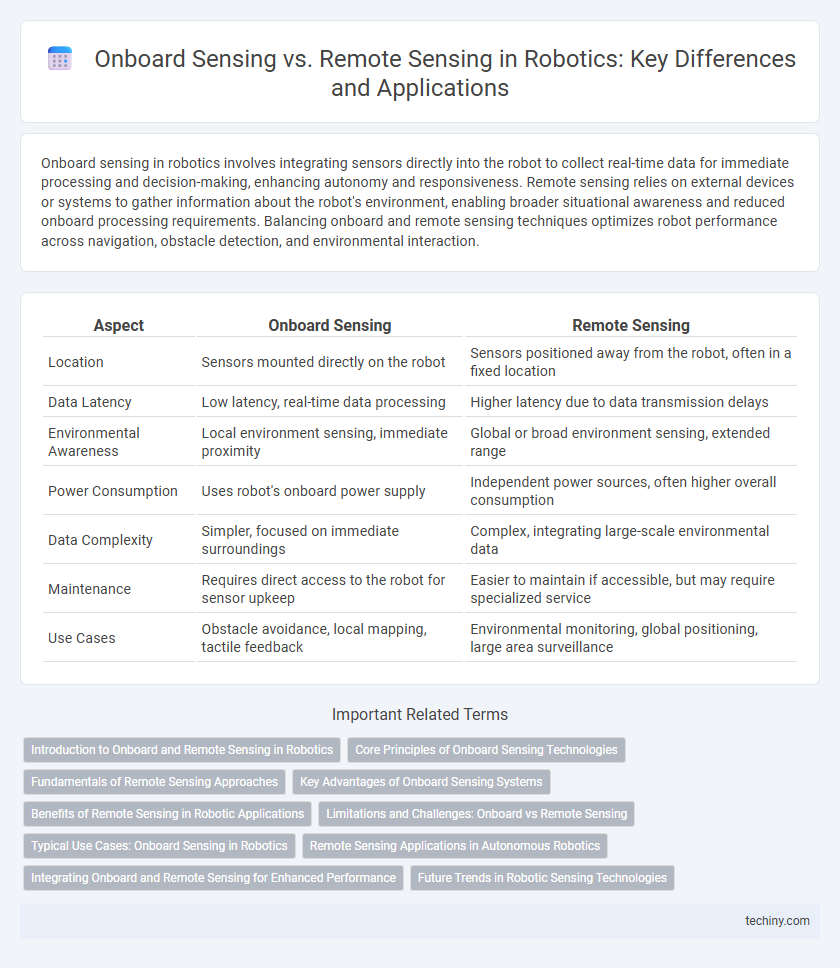
| Aspect | Onboard Sensing | Remote Sensing |
|---|---|---|
| Location | Sensors mounted directly on the robot | Sensors positioned away from the robot, often in a fixed location |
| Data Latency | Low latency, real-time data processing | Higher latency due to data transmission delays |
| Environmental Awareness | Local environment sensing, immediate proximity | Global or broad environment sensing, extended range |
| Power Consumption | Uses robot's onboard power supply | Independent power sources, often higher overall consumption |
| Data Complexity | Simpler, focused on immediate surroundings | Complex, integrating large-scale environmental data |
| Maintenance | Requires direct access to the robot for sensor upkeep | Easier to maintain if accessible, but may require specialized service |
| Use Cases | Obstacle avoidance, local mapping, tactile feedback | Environmental monitoring, global positioning, large area surveillance |
Introduction to Onboard and Remote Sensing in Robotics
Onboard sensing in robotics involves integrating sensors directly onto the robot to collect real-time data about its immediate environment, enabling autonomous navigation and dynamic interaction with surroundings. Remote sensing utilizes external devices such as cameras, LiDAR, or radar positioned at a distance to gather environmental information, allowing for broader area monitoring and situational awareness beyond the robot's physical location. Combining onboard and remote sensing enhances robotic systems' accuracy, adaptability, and operational efficiency in complex applications.
Core Principles of Onboard Sensing Technologies
Onboard sensing technologies in robotics rely on locally integrated sensors such as LiDAR, cameras, and inertial measurement units (IMUs) to collect real-time environmental data directly from the robot's immediate surroundings. These sensors enable autonomous navigation and obstacle avoidance by providing high-frequency, precise measurements without dependency on external signals or infrastructure. Core principles include sensor fusion for enhanced accuracy, low latency data processing, and robustness to environmental variations to ensure reliable robot performance.
Fundamentals of Remote Sensing Approaches
Remote sensing in robotics involves collecting data from sensors positioned away from the target environment, utilizing technologies such as LiDAR, radar, and camera systems to capture spatial and spectral information. Fundamental approaches include passive remote sensing, which relies on ambient energy sources like sunlight, and active remote sensing that emits signals and measures their reflection to gather precise distance and surface characteristics. These methods enable robots to perceive environments beyond immediate physical contact, enhancing navigation, mapping, and object detection in complex or hazardous settings.
Key Advantages of Onboard Sensing Systems
Onboard sensing systems in robotics offer superior real-time data processing and immediate environmental interaction, enabling faster decision-making and enhanced autonomy. These sensors provide continuous, high-resolution feedback directly from the robot, minimizing latency and reliance on external infrastructure. Their integration supports robust navigation, obstacle detection, and adaptive control in dynamic and unpredictable environments.
Benefits of Remote Sensing in Robotic Applications
Remote sensing in robotic applications enhances environmental awareness by providing a broader and more comprehensive perspective beyond the immediate surroundings. It enables robots to detect and analyze distant objects, obstacles, and terrain features, improving navigation and operational efficiency in complex or hazardous environments. This capability supports advanced functions such as large-scale mapping, real-time monitoring, and autonomous decision-making, crucial for applications in agriculture, surveillance, and disaster response.
Limitations and Challenges: Onboard vs Remote Sensing
Onboard sensing in robotics faces limitations such as restricted power supply, limited computational capacity, and sensor occlusion due to the robot's structure, impacting real-time data processing. Remote sensing challenges include signal latency, dependency on external communication infrastructure, and environmental interferences like weather conditions that affect sensor accuracy. Both sensing methods struggle with data fusion complexities and calibration issues, necessitating advanced algorithms to ensure reliable perception in dynamic environments.
Typical Use Cases: Onboard Sensing in Robotics
Onboard sensing in robotics typically involves real-time data acquisition from sensors integrated directly into the robot, such as LiDAR, cameras, and inertial measurement units (IMUs), enabling immediate environment mapping and obstacle detection. Common applications include autonomous navigation in mobile robots, precision manipulation in industrial robots, and dynamic interaction in service robots. These sensors provide critical feedback for motion control and adaptive behavior in complex and unpredictable environments.
Remote Sensing Applications in Autonomous Robotics
Remote sensing in autonomous robotics enables real-time environmental mapping and obstacle detection using technologies like LiDAR, radar, and satellite imaging. These sensors provide extensive range and high-resolution data critical for navigation, surveillance, and terrain analysis in challenging or expansive environments. Applications span from agricultural monitoring and disaster response to autonomous vehicle navigation, enhancing operational efficiency and safety beyond the limitations of onboard sensing.
Integrating Onboard and Remote Sensing for Enhanced Performance
Integrating onboard sensing systems, such as LiDAR and IMUs, with remote sensing technologies like satellite imagery and cloud-based sensors enables robots to achieve superior environmental awareness and operational accuracy. This fusion allows seamless data synchronization, enhancing real-time decision-making, especially in dynamic and complex settings like autonomous navigation and industrial automation. Leveraging machine learning algorithms to process combined datasets further optimizes sensor fusion, resulting in improved obstacle detection, localization, and task execution efficiency.
Future Trends in Robotic Sensing Technologies
Future trends in robotic sensing technologies emphasize the integration of advanced onboard sensing systems capable of real-time processing and decision-making, enabling robots to operate autonomously in complex environments. Remote sensing technologies, enhanced by higher-resolution sensors and improved communication networks such as 5G and edge computing, expand the range and accuracy of environmental data acquisition for robotics applications. The synergy between onboard and remote sensing, supported by AI-driven data fusion algorithms, will drive breakthroughs in perception, navigation, and interaction capabilities for next-generation robotic platforms.
Onboard sensing vs Remote sensing Infographic