Behavior-based architecture in robotics emphasizes real-time sensorimotor interactions and reactive control, enabling robots to respond swiftly to dynamic environments without extensive internal models. Deliberative architecture relies on complex planning and world modeling, allowing robots to make informed decisions through reasoning and premeditated actions. Integrating both architectures can enhance robustness by balancing immediate responsiveness with strategic planning.
Table of Comparison
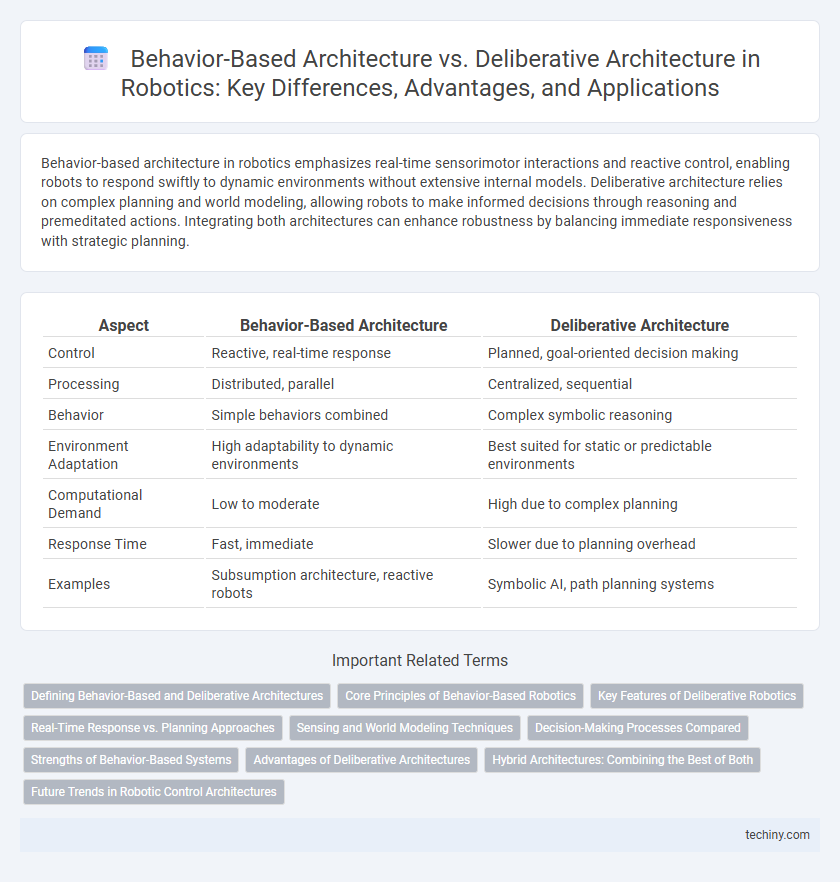
| Aspect | Behavior-Based Architecture | Deliberative Architecture |
|---|---|---|
| Control | Reactive, real-time response | Planned, goal-oriented decision making |
| Processing | Distributed, parallel | Centralized, sequential |
| Behavior | Simple behaviors combined | Complex symbolic reasoning |
| Environment Adaptation | High adaptability to dynamic environments | Best suited for static or predictable environments |
| Computational Demand | Low to moderate | High due to complex planning |
| Response Time | Fast, immediate | Slower due to planning overhead |
| Examples | Subsumption architecture, reactive robots | Symbolic AI, path planning systems |
Defining Behavior-Based and Deliberative Architectures
Behavior-based architecture in robotics relies on reactive control systems that respond directly to sensory inputs without extensive internal modeling, enabling real-time adaptation and robustness in dynamic environments. Deliberative architecture involves constructing detailed internal representations and planning actions through symbolic reasoning and task decomposition, prioritizing long-term goal achievement and complex decision-making. These contrasting frameworks define robotic control by emphasizing either immediate environmental interaction or structured, computationally intensive planning processes.
Core Principles of Behavior-Based Robotics
Behavior-based robotics centers on decentralized control systems where independent behaviors operate concurrently to generate adaptive responses without requiring detailed environmental models. This architecture emphasizes real-time sensory inputs and direct coupling between perception and action to facilitate robustness and scalability in dynamic environments. Core principles include modularity, emergent behavior from simple components, and situatedness, distinguishing it fundamentally from deliberative architectures that rely on symbolic representation and pre-planned sequences.
Key Features of Deliberative Robotics
Deliberative robotics architecture emphasizes high-level reasoning, planning, and knowledge representation, enabling robots to analyze complex environments and make informed decisions before acting. It relies on a symbolic world model, structured data processing, and extended computation times to generate precise, goal-oriented behaviors. This approach contrasts with reactive systems by prioritizing foresight and strategic planning over immediate sensor-driven responses.
Real-Time Response vs. Planning Approaches
Behavior-based architecture excels in real-time response by using decentralized control units that process sensory inputs for immediate action, making it ideal for dynamic and unpredictable environments. Deliberative architecture relies on a centralized planning system that constructs detailed models and sequences actions for long-term goals, often resulting in slower response times. Combining these architectures can leverage the fast, reactive capabilities of behavior-based systems with the strategic foresight of deliberative planning.
Sensing and World Modeling Techniques
Behavior-based architecture utilizes reactive sensing techniques that prioritize real-time environmental interaction without extensive world modeling, enabling swift adaptation to dynamic surroundings. Deliberative architecture relies on comprehensive sensing methods combined with detailed world modeling, facilitating complex decision-making through internal representations of the environment. Sensing in behavior-based systems often involves distributed sensors feeding direct stimulus-response loops, whereas deliberative systems integrate sensor data into global maps or models for predictive planning.
Decision-Making Processes Compared
Behavior-based architecture enables robots to make real-time decisions using reactive control systems that prioritize sensorimotor coordination and immediate responses to environmental changes. Deliberative architecture relies on symbolic reasoning and pre-planned strategies, processing complex data to formulate long-term goals before executing actions. The decision-making process in behavior-based systems is decentralized and parallel, whereas deliberative systems emphasize centralized, sequential planning and cognitive modeling.
Strengths of Behavior-Based Systems
Behavior-based architectures excel in real-time responsiveness and robustness by directly mapping sensor inputs to reactive behaviors, enabling robots to operate effectively in dynamic, unpredictable environments. These systems require minimal computational resources and allow for scalable, modular design, facilitating quick adaptation and fault tolerance without complex world modeling. Their decentralized control approach enhances parallel processing and reduces latency, making them ideal for tasks requiring immediate, reflexive actions.
Advantages of Deliberative Architectures
Deliberative architectures enable robots to perform complex reasoning and long-term planning by maintaining an internal world model that supports decision-making based on predicted outcomes. They facilitate adaptive responses to novel or dynamic environments through systematic evaluation of possible actions before execution. These architectures excel in tasks requiring strategic problem-solving and higher-level cognition, enhancing robot autonomy and robustness in uncertain scenarios.
Hybrid Architectures: Combining the Best of Both
Hybrid architectures in robotics integrate the reactive, real-time responses of behavior-based systems with the strategic, planning capabilities of deliberative architectures. This synergy enhances robot adaptability and decision-making by enabling simultaneous low-level sensory processing and high-level reasoning. Emerging robotic platforms employ hybrid models to achieve robust performance in dynamic, unstructured environments, optimizing both efficiency and flexibility.
Future Trends in Robotic Control Architectures
Future trends in robotic control architectures emphasize the integration of behavior-based and deliberative systems to enhance autonomy and adaptability. Advances in machine learning and real-time data processing enable hybrid models that combine reactive behavior modules with high-level planning for complex task execution. Emerging architectures prioritize scalability and robustness, leveraging distributed control networks and cognitive reasoning to address dynamic and uncertain environments.
Behavior-based architecture vs Deliberative architecture Infographic