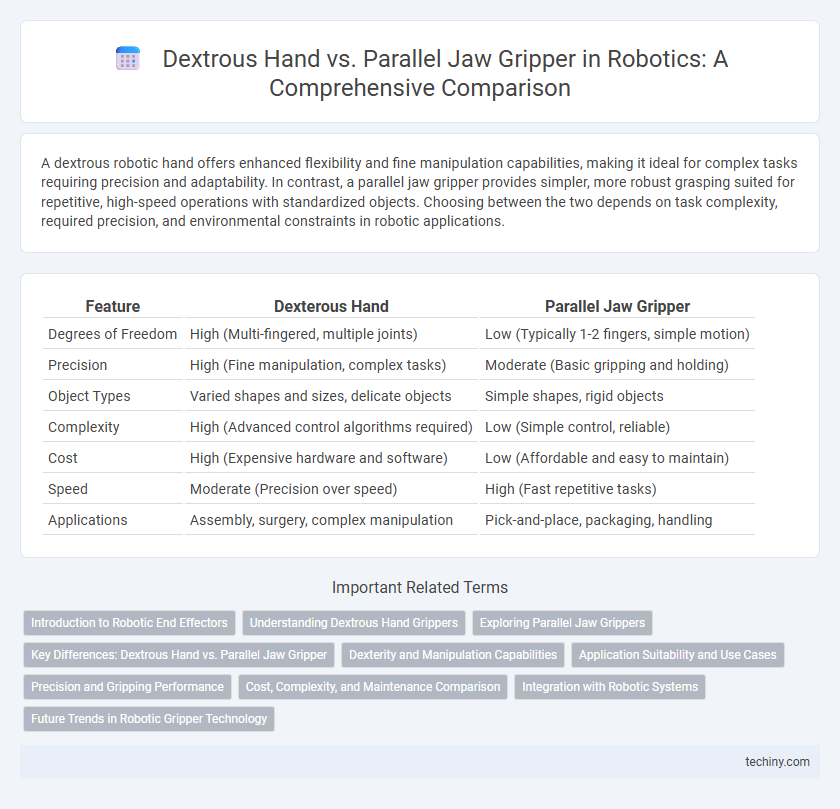
A dextrous robotic hand offers enhanced flexibility and fine manipulation capabilities, making it ideal for complex tasks requiring precision and adaptability. In contrast, a parallel jaw gripper provides simpler, more robust grasping suited for repetitive, high-speed operations with standardized objects. Choosing between the two depends on task complexity, required precision, and environmental constraints in robotic applications.
Table of Comparison
| Feature | Dexterous Hand | Parallel Jaw Gripper |
|---|---|---|
| Degrees of Freedom | High (Multi-fingered, multiple joints) | Low (Typically 1-2 fingers, simple motion) |
| Precision | High (Fine manipulation, complex tasks) | Moderate (Basic gripping and holding) |
| Object Types | Varied shapes and sizes, delicate objects | Simple shapes, rigid objects |
| Complexity | High (Advanced control algorithms required) | Low (Simple control, reliable) |
| Cost | High (Expensive hardware and software) | Low (Affordable and easy to maintain) |
| Speed | Moderate (Precision over speed) | High (Fast repetitive tasks) |
| Applications | Assembly, surgery, complex manipulation | Pick-and-place, packaging, handling |
Introduction to Robotic End Effectors
Robotic end effectors such as dexterous hands and parallel jaw grippers serve distinct functions in manipulation tasks. Dexterous hands mimic the complex motions of human fingers, enabling precise control and versatility for delicate or intricate handling. Parallel jaw grippers offer simpler, robust gripping mechanisms ideal for stable grasping of uniform objects in industrial automation.
Understanding Dextrous Hand Grippers
Dextrous hand grippers mimic the complex biomechanics of the human hand, enabling precise manipulation of a wide variety of objects with adaptive finger movements and force control. Unlike parallel jaw grippers, which operate with simple open-and-close motions, dextrous hands use multiple degrees of freedom and tactile sensors to perform intricate tasks such as object rotation, in-hand adjustments, and delicate handling. This advanced functionality makes dextrous hand grippers essential for applications requiring high dexterity, including prosthetics, assembly lines, and robotic research in unstructured environments.
Exploring Parallel Jaw Grippers
Parallel jaw grippers offer a simple yet effective solution for robotic grasping, providing consistent force distribution and precise control for gripping objects of various shapes and sizes. Their design enables easy integration into automation systems while maintaining robustness in handling delicate or rigid items. Compared to dexterous hands, parallel jaw grippers excel in tasks requiring repetitive, high-speed gripping with minimal mechanical complexity.
Key Differences: Dextrous Hand vs. Parallel Jaw Gripper
Dextrous hands feature multiple articulated fingers enabling complex manipulation tasks such as precise object rotation and varied grasp types, while parallel jaw grippers use two opposing jaws primarily for simple, robust gripping actions. The control complexity and cost of dextrous hands are significantly higher due to intricate mechanics and sensory integration compared to the straightforward design and operation of parallel jaw grippers. Dextrous hands excel in handling delicate or irregularly shaped objects, whereas parallel jaw grippers are preferred for high-speed, repetitive industrial applications requiring reliability and strength.
Dexterity and Manipulation Capabilities
Dexterous robotic hands offer enhanced manipulation capabilities through multiple degrees of freedom, allowing for precise, human-like finger movements and complex object handling. In contrast, parallel jaw grippers provide simpler, robust grasping suited for repetitive pick-and-place tasks but lack nuanced control over object orientation and manipulation. The superior dexterity of robotic hands enables advanced tasks such as in-hand object reorientation, delicate assembly, and adaptive grasping in unstructured environments.
Application Suitability and Use Cases
Dexterous robotic hands excel in complex manipulation tasks requiring precision and adaptability, such as assembly, medical surgery, and intricate object handling in unstructured environments. Parallel jaw grippers are ideal for applications needing high force, simplicity, and reliability, like material handling, packaging, and pick-and-place operations in structured industrial settings. Selecting between dexterous hands and parallel jaw grippers depends on the task's complexity, environment variability, and precision demands.
Precision and Gripping Performance
Dextrous robotic hands offer superior precision and versatile manipulation capabilities due to their multiple degrees of freedom and articulated fingers, enabling complex tasks such as object rotation and delicate handling. Parallel jaw grippers excel in robust gripping performance with simpler, more reliable mechanisms optimized for high force application and repeatable grasping of uniform objects. The choice between these gripping systems depends heavily on the specific precision requirements and the variability of the objects handled in robotic applications.
Cost, Complexity, and Maintenance Comparison
Dextrous robotic hands feature intricate mechanical structures and multiple degrees of freedom, resulting in higher costs and increased complexity compared to parallel jaw grippers, which have simpler two-finger designs and lower manufacturing expenses. Maintenance demands for dextrous hands are significant due to numerous moving parts and sophisticated sensor integration, whereas parallel jaw grippers require less frequent servicing and have straightforward repair processes. The trade-off between advanced manipulation capabilities of dextrous hands and the cost-efficiency and reliability of parallel jaw grippers influences selection in industrial automation tasks.
Integration with Robotic Systems
Dexterous hands offer superior integration with robotic systems through their multi-degree-of-freedom design, enabling complex manipulation tasks and adaptive grasping in dynamic environments. Parallel jaw grippers provide simpler integration and higher reliability for applications requiring straightforward gripping and consistent force control. Selecting the appropriate end-effector depends on balancing the complexity of robotic control algorithms and the precision of task-specific manipulation.
Future Trends in Robotic Gripper Technology
Future trends in robotic gripper technology emphasize advancements in dextrous hands, featuring enhanced sensor integration and adaptive control algorithms to mimic human-like manipulation capabilities. Parallel jaw grippers continue to evolve with improved force feedback and modular designs, optimizing precision and efficiency for industrial applications. Emerging AI-driven control systems and soft robotics materials are driving a shift toward more versatile and intelligent gripping solutions capable of handling complex, delicate tasks.
dextrous hand vs parallel jaw gripper Infographic