Bin picking excels in automating the random identification and extraction of parts from cluttered containers using advanced vision systems and robot manipulators. Assembly tasks demand precise alignment and integration of components, requiring robots with fine motion control and adaptive grippers to ensure accurate joining. Both processes enhance manufacturing efficiency but differ significantly in complexity and end-goal precision.
Table of Comparison
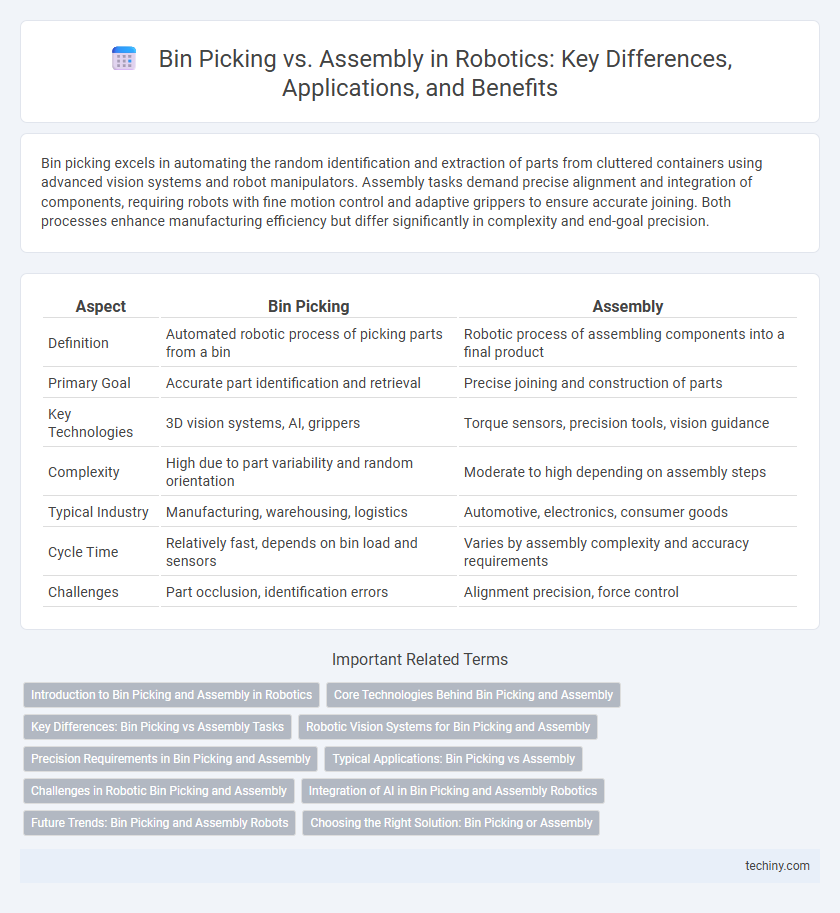
| Aspect | Bin Picking | Assembly |
|---|---|---|
| Definition | Automated robotic process of picking parts from a bin | Robotic process of assembling components into a final product |
| Primary Goal | Accurate part identification and retrieval | Precise joining and construction of parts |
| Key Technologies | 3D vision systems, AI, grippers | Torque sensors, precision tools, vision guidance |
| Complexity | High due to part variability and random orientation | Moderate to high depending on assembly steps |
| Typical Industry | Manufacturing, warehousing, logistics | Automotive, electronics, consumer goods |
| Cycle Time | Relatively fast, depends on bin load and sensors | Varies by assembly complexity and accuracy requirements |
| Challenges | Part occlusion, identification errors | Alignment precision, force control |
Introduction to Bin Picking and Assembly in Robotics
Bin picking in robotics involves the automated identification, grasping, and retrieval of randomly oriented parts from a container using advanced vision systems and robotic arms. Assembly robotics focuses on the precise manipulation and joining of components to create finished products, often requiring high accuracy and coordination of multiple robotic tools. Both processes leverage machine learning and sensor integration to enhance efficiency and adaptability in industrial automation.
Core Technologies Behind Bin Picking and Assembly
Bin picking relies heavily on advanced 3D vision systems and machine learning algorithms to accurately identify and grasp randomly oriented parts from cluttered environments. Assembly processes depend on precision robotics combined with force sensing and real-time feedback control to ensure accurate part alignment and insertion. Core technologies integrating AI-driven perception, sensor fusion, and adaptive motion planning distinguish bin picking from the repetitive precision focus in assembly tasks.
Key Differences: Bin Picking vs Assembly Tasks
Bin picking involves robotic systems identifying, grasping, and sorting random objects from a cluttered bin using advanced vision and gripping technology, emphasizing object recognition and precision handling. Assembly tasks require robots to manipulate components with high accuracy to fit parts together, relying on route planning, force control, and interaction with multiple objects in a defined sequence. The key difference lies in bin picking's focus on variability and unstructured environments, while assembly prioritizes structured, repeatable, and precise component integration.
Robotic Vision Systems for Bin Picking and Assembly
Robotic vision systems for bin picking leverage advanced 3D imaging and deep learning algorithms to accurately identify, locate, and grasp randomly oriented objects, significantly enhancing automation efficiency in complex, unstructured environments. In contrast, vision systems for assembly emphasize precise alignment and verification of components using high-resolution cameras and pattern recognition techniques to ensure correct part placement and quality control. Integration of adaptive vision technology in both bin picking and assembly processes drives higher throughput, reduced errors, and improved flexibility in industrial robotics applications.
Precision Requirements in Bin Picking and Assembly
Bin picking demands exceptionally high precision in object recognition and robotic arm alignment to accurately identify and grasp randomly placed items. Assembly processes require meticulous precision in component placement and fastening to ensure structural integrity and functional performance. Both tasks rely on advanced sensors and control algorithms, but bin picking emphasizes adaptive vision systems while assembly prioritizes exact positional accuracy.
Typical Applications: Bin Picking vs Assembly
Bin picking is commonly applied in automated material handling, sorting, and packaging where robots identify and grasp randomly placed parts from containers to streamline production lines. Assembly tasks typically involve precise, multi-step operations such as fitting, fastening, and quality inspection to build complex products like electronics or automotive components. Industrial robots equipped with advanced sensors and machine vision systems enhance efficiency and accuracy in both bin picking and assembly applications.
Challenges in Robotic Bin Picking and Assembly
Robotic bin picking faces significant challenges in object recognition and pose estimation due to random object orientation and occlusion within cluttered environments. Assembly tasks require high precision and adaptability to variations in part geometries and alignment tolerances, demanding advanced force control and real-time feedback systems. Both applications struggle with sensor noise and the need for robust motion planning to ensure efficient and accurate manipulation.
Integration of AI in Bin Picking and Assembly Robotics
Integration of AI in bin picking robotics enhances object recognition, grasping precision, and real-time decision-making, enabling robots to handle random, cluttered environments efficiently. In assembly robotics, AI optimizes complex task sequencing and adaptive motion control, facilitating flexible manufacturing processes and error reduction. Both applications benefit from machine learning algorithms that improve over time, driving higher productivity and operational accuracy in automated systems.
Future Trends: Bin Picking and Assembly Robots
Future trends in bin picking and assembly robots emphasize advanced machine learning algorithms for improved object recognition and manipulation accuracy. Integration of AI-driven vision systems enables robots to efficiently handle complex, unstructured environments, boosting productivity in manufacturing. Collaborative robots (cobots) with enhanced safety features are increasingly adopted for flexible automation that seamlessly combines bin picking and assembly tasks.
Choosing the Right Solution: Bin Picking or Assembly
Choosing the right robotic solution hinges on the specific task requirements: bin picking excels in automating the detection and retrieval of randomly oriented parts using advanced vision systems, optimizing efficiency in sorting and feeding operations. Assembly robotics prioritize precision and repeatability, ideal for integrating components with complex geometries or fine tolerances in manufacturing lines. Evaluating factors such as part variability, cycle times, and system scalability ensures the best alignment between bin picking and assembly applications.
Bin picking vs assembly Infographic