Manipulators are robotic arms designed for precise tasks within a fixed workspace, excelling in assembly, welding, and material handling. Mobile robots possess autonomous movement capabilities, allowing them to navigate dynamic environments for applications like inspection, delivery, and exploration. Understanding the strengths of manipulators in manipulation versus mobile robots in mobility enables optimized deployment in industrial and service robotics.
Table of Comparison
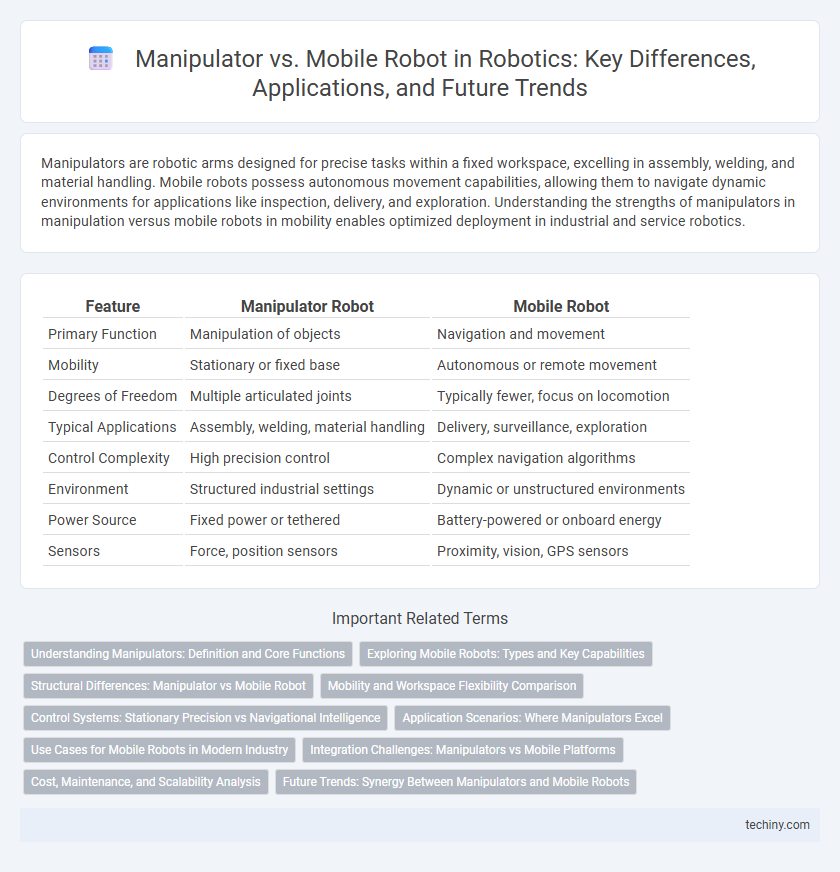
| Feature | Manipulator Robot | Mobile Robot |
|---|---|---|
| Primary Function | Manipulation of objects | Navigation and movement |
| Mobility | Stationary or fixed base | Autonomous or remote movement |
| Degrees of Freedom | Multiple articulated joints | Typically fewer, focus on locomotion |
| Typical Applications | Assembly, welding, material handling | Delivery, surveillance, exploration |
| Control Complexity | High precision control | Complex navigation algorithms |
| Environment | Structured industrial settings | Dynamic or unstructured environments |
| Power Source | Fixed power or tethered | Battery-powered or onboard energy |
| Sensors | Force, position sensors | Proximity, vision, GPS sensors |
Understanding Manipulators: Definition and Core Functions
Manipulators are robotic devices designed primarily for precise control and movement of objects within a fixed workspace, often equipped with articulated arms and end-effectors to perform tasks such as assembly, welding, and material handling. Unlike mobile robots that navigate through environments, manipulators operate with high accuracy in controlled settings, leveraging kinematic chains and sensors for spatial positioning and force application. Core functions of manipulators include object manipulation, path planning, and interaction with various tools to enhance automation in industrial and manufacturing processes.
Exploring Mobile Robots: Types and Key Capabilities
Mobile robots are designed for navigation and exploration across diverse environments, equipped with sensors such as LIDAR, cameras, and ultrasonic devices to enable real-time mapping and obstacle avoidance. Unlike manipulators, which specialize in precise object handling and manipulation within fixed areas, mobile robots integrate mobility with perception, allowing autonomous operation in dynamic and unstructured settings. Key capabilities include simultaneous localization and mapping (SLAM), adaptive path planning, and environmental interaction, making them ideal for applications like search and rescue, surveillance, and planetary exploration.
Structural Differences: Manipulator vs Mobile Robot
Manipulators feature a fixed base with articulated joints allowing precise control of end-effector positioning for tasks such as assembly or welding. Mobile robots combine locomotion systems like wheels or tracks with sensors and control units, enabling navigation through dynamic environments. The structural distinction lies in manipulators' stationary frames optimized for accuracy, while mobile robots prioritize mobility and environmental adaptability.
Mobility and Workspace Flexibility Comparison
Manipulators excel in precise manipulation tasks within a fixed workspace, offering high degrees of freedom for complex operations but limited mobility beyond their installation area. Mobile robots provide enhanced mobility, navigating varied environments and expanding operational reach but often sacrifice the fine dexterity and payload capacity found in fixed manipulators. Combining the strengths of both systems enables flexible deployment in dynamic settings, optimizing workspace coverage and task adaptability.
Control Systems: Stationary Precision vs Navigational Intelligence
Manipulators rely on highly precise control systems designed for stationary tasks, employing feedback loops and fine motor control to execute exact movements in manufacturing or assembly. Mobile robots utilize advanced navigational intelligence, integrating sensors such as LIDAR, GPS, and computer vision algorithms to adaptively plan paths and avoid obstacles in dynamic environments. The contrast in control systems highlights manipulators' emphasis on repeatable accuracy versus mobile robots' focus on real-time environmental interaction and autonomous decision-making.
Application Scenarios: Where Manipulators Excel
Manipulators excel in precise assembly operations, surgical procedures, and laboratory automation where fixed positioning and fine motor control are critical. Their structured environment allows for high repeatability and accuracy in tasks such as welding, packaging, and electronics manufacturing. Mobile robots, while versatile in navigation, lack the manipulators' specialized dexterity required for intricate manipulation tasks.
Use Cases for Mobile Robots in Modern Industry
Mobile robots excel in material handling, inventory management, and autonomous delivery within warehouses and manufacturing plants. They enhance flexibility by navigating complex environments and adapting to dynamic tasks without extensive reprogramming. Industrial sectors increasingly deploy mobile robots to improve operational efficiency, reduce labor costs, and enable real-time data collection for process optimization.
Integration Challenges: Manipulators vs Mobile Platforms
Manipulators face integration challenges primarily related to precise control, limited workspace, and complex kinematics, requiring advanced algorithms for exact positioning and force feedback. Mobile robots encounter difficulties in navigation, localization, and environmental adaptability, demanding robust sensors and real-time processing to ensure mobility and obstacle avoidance. Combining manipulators with mobile platforms intensifies these challenges by necessitating seamless coordination between arm control and platform dynamics for efficient task execution in unstructured environments.
Cost, Maintenance, and Scalability Analysis
Manipulators typically offer lower initial costs and simpler maintenance compared to mobile robots, which involve complex navigation systems and sensors that increase both expense and upkeep demands. Scalability favors mobile robots due to their modular design and ability to operate in varied environments, whereas manipulators require significant reconfiguration or duplication for expanded tasks. Cost efficiency in manipulators suits fixed-location applications, while mobile robots provide flexible scalability at higher operational investments.
Future Trends: Synergy Between Manipulators and Mobile Robots
Emerging research highlights the integration of manipulators with mobile robots, enhancing autonomous operation in dynamic environments through advanced sensor fusion and AI-driven control algorithms. Collaborative systems leverage manipulators' precision with mobile robots' navigation capabilities, enabling complex tasks like warehouse automation and disaster response with increased efficiency and flexibility. This synergy is propelled by developments in lightweight robotics, real-time data processing, and adaptive machine learning models, driving the next generation of intelligent robotic systems.
Manipulator vs mobile robot Infographic