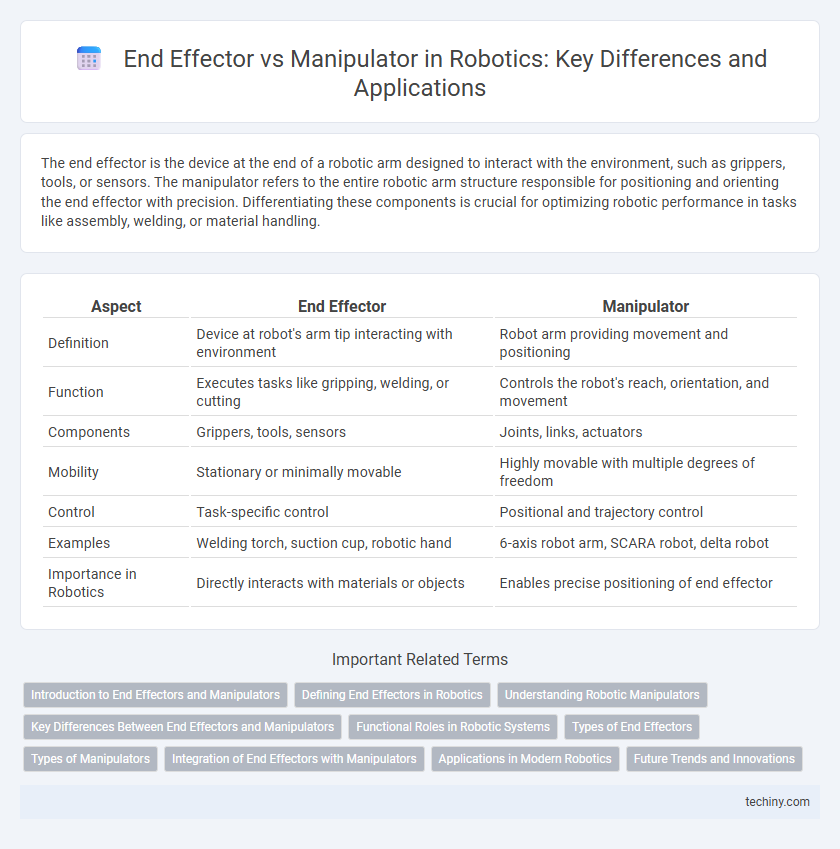
The end effector is the device at the end of a robotic arm designed to interact with the environment, such as grippers, tools, or sensors. The manipulator refers to the entire robotic arm structure responsible for positioning and orienting the end effector with precision. Differentiating these components is crucial for optimizing robotic performance in tasks like assembly, welding, or material handling.
Table of Comparison
| Aspect | End Effector | Manipulator |
|---|---|---|
| Definition | Device at robot's arm tip interacting with environment | Robot arm providing movement and positioning |
| Function | Executes tasks like gripping, welding, or cutting | Controls the robot's reach, orientation, and movement |
| Components | Grippers, tools, sensors | Joints, links, actuators |
| Mobility | Stationary or minimally movable | Highly movable with multiple degrees of freedom |
| Control | Task-specific control | Positional and trajectory control |
| Examples | Welding torch, suction cup, robotic hand | 6-axis robot arm, SCARA robot, delta robot |
| Importance in Robotics | Directly interacts with materials or objects | Enables precise positioning of end effector |
Introduction to End Effectors and Manipulators
End effectors are specialized devices attached to the end of a robotic arm, designed to interact with the environment for tasks such as gripping, welding, or assembly. Manipulators encompass the entire robotic arm, including joints and links, responsible for positioning the end effector with precision. Understanding the distinct roles of manipulators and end effectors is crucial in robotics for optimizing task execution and automation capabilities.
Defining End Effectors in Robotics
End effectors in robotics are specialized devices attached to the end of a robotic arm or manipulator designed to interact with the environment, such as grippers, welding torches, or sensors. They serve as the primary interface between the robot and its task, enabling functions like grasping, cutting, or measuring. Unlike the manipulator, which provides movement and positioning, end effectors execute specific actions required for task completion.
Understanding Robotic Manipulators
Robotic manipulators are mechanical arms designed to perform complex tasks by mimicking human arm movements, consisting of multiple joints and links for precise positioning and orientation. End effectors serve as the tools or devices attached to the manipulator's wrist, enabling specific interactions with the environment such as gripping, welding, or assembling. Understanding the distinct roles highlights that manipulators provide mobility and dexterity, while end effectors execute task-specific functions.
Key Differences Between End Effectors and Manipulators
End effectors and manipulators serve distinct roles in robotics, with manipulators acting as the robotic arm responsible for movement and positioning, while end effectors function as the tools attached to manipulators for performing specific tasks such as gripping, welding, or cutting. Manipulators typically consist of joints, links, and actuators enabling multi-degree freedom motion, whereas end effectors are specialized components designed to interact directly with the environment or workpieces. The key difference lies in manipulators providing the mechanical structure and motion control, while end effectors deliver task-specific interaction capabilities.
Functional Roles in Robotic Systems
End effectors serve as the robotic system's tool interface, executing specific tasks such as gripping, welding, or painting, directly interacting with objects in the environment. Manipulators provide the structural framework and mechanical linkage that enable precise movement and positioning of the end effector within a robot's workspace. The synergy between manipulators and end effectors determines the robot's overall functionality, flexibility, and application scope in industrial and service robotics.
Types of End Effectors
End effectors are critical components of robotic manipulators, designed to interact with the environment and perform specific tasks. Common types of end effectors include grippers, which can be mechanical, vacuum, or magnetic, welding torches for fabrication, and sensors for inspection tasks. Each type is optimized for precision, payload capacity, and application-specific requirements in automation and manufacturing processes.
Types of Manipulators
Manipulators in robotics include articulated, SCARA, Cartesian, and delta types, each designed for specific motion and precision tasks. Articulated manipulators resemble human arms with rotary joints, offering high flexibility and range of motion for complex assembly operations. SCARA and Cartesian manipulators excel in speed and accuracy for pick-and-place or straight-line tasks, while delta manipulators provide rapid, parallel movements suited for high-speed packaging.
Integration of End Effectors with Manipulators
End effectors serve as the functional components of robotic systems, designed to interact with the environment by gripping, welding, or assembling objects. Manipulators provide the structural movement and positioning capabilities required to accurately place end effectors in three-dimensional space for task execution. Seamless integration of end effectors with manipulators optimizes precision, payload capacity, and adaptability, enabling robots to perform complex operations in manufacturing, healthcare, and automation industries.
Applications in Modern Robotics
End effectors serve as the robotic hand or tool that interacts directly with objects, essential for tasks such as gripping, welding, or painting in manufacturing automation, assembly lines, and surgical robotics. Manipulators consist of the robotic arm and joints providing precise movement and positioning, critical in applications requiring dexterity and reach like material handling, inspection, and hazardous environment operations. The synergy between advanced manipulators and specialized end effectors enables modern robots to perform complex, high-precision tasks across diverse industries, enhancing efficiency and safety.
Future Trends and Innovations
Future trends in robotics emphasize advanced end effectors with enhanced dexterity, sensory feedback, and adaptive gripping capabilities, enabling more precise and versatile manipulation tasks. Manipulators are evolving with integration of AI-driven control systems and lightweight, compliant materials to improve flexibility, efficiency, and human-robot collaboration. Innovations like soft robotics and modular end effectors are poised to revolutionize industrial automation, medical applications, and unstructured environment navigation.
End effector vs Manipulator Infographic