Grippers provide precise control and strong mechanical hold, making them ideal for handling irregular or heavy objects with varying shapes and textures. Suction cups excel in picking up smooth, flat surfaces quickly and gently, minimizing damage risk in delicate applications. Choosing between a gripper and a suction cup depends on the object's material, shape, and required handling speed in robotic automation.
Table of Comparison
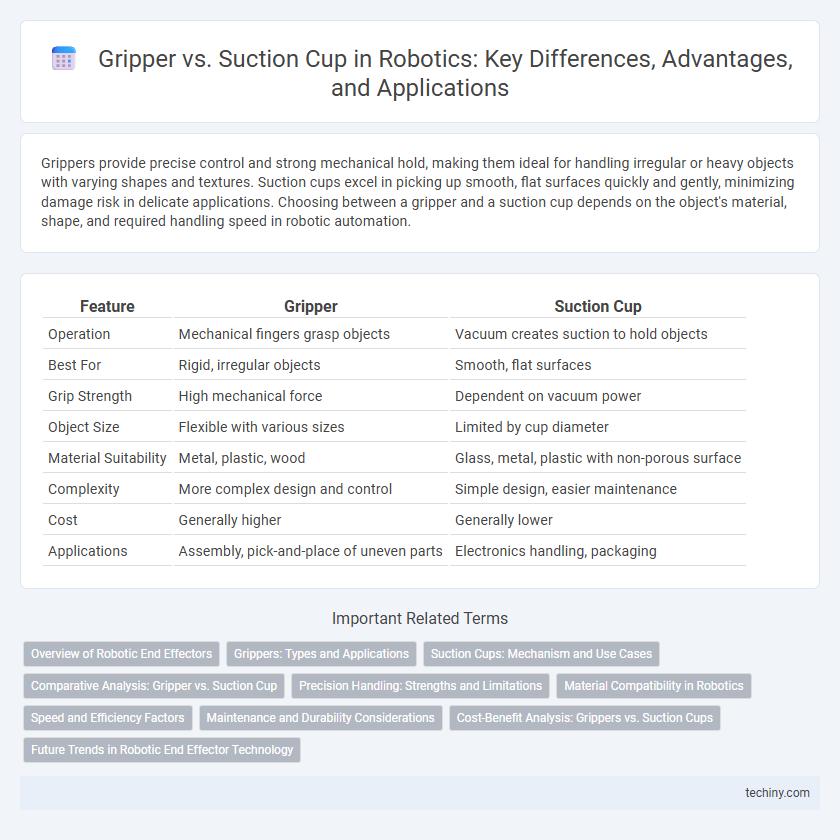
| Feature | Gripper | Suction Cup |
|---|---|---|
| Operation | Mechanical fingers grasp objects | Vacuum creates suction to hold objects |
| Best For | Rigid, irregular objects | Smooth, flat surfaces |
| Grip Strength | High mechanical force | Dependent on vacuum power |
| Object Size | Flexible with various sizes | Limited by cup diameter |
| Material Suitability | Metal, plastic, wood | Glass, metal, plastic with non-porous surface |
| Complexity | More complex design and control | Simple design, easier maintenance |
| Cost | Generally higher | Generally lower |
| Applications | Assembly, pick-and-place of uneven parts | Electronics handling, packaging |
Overview of Robotic End Effectors
Robotic end effectors, crucial for task execution in automation, primarily include grippers and suction cups, each tailored for specific handling needs. Grippers offer mechanical grasping capabilities suitable for delicate or irregularly shaped objects, utilizing fingers or claws to secure items with precision and adjustable force. Suction cups rely on vacuum pressure to attach to flat, smooth surfaces, providing a gentle, non-invasive grip ideal for lightweight and fragile materials in high-speed pick-and-place operations.
Grippers: Types and Applications
Grippers in robotics come in various types such as parallel, angular, and adaptive grippers, each designed to handle different object shapes and sizes with precision. Parallel grippers excel in pick-and-place tasks with consistent shapes, while adaptive grippers conform to irregular surfaces for fragile or uneven objects. These grippers find extensive applications in manufacturing assembly lines, packaging industries, and medical robotics where precise handling and manipulation are crucial.
Suction Cups: Mechanism and Use Cases
Suction cups operate by creating a vacuum between the cup and the object's surface, enabling secure lifting and manipulation of items with smooth, non-porous textures. Their mechanism involves a flexible membrane that contracts when air is evacuated, generating negative pressure to hold objects firmly without mechanical clamping. Common use cases include handling glass panels, electronics components, and packaging materials in automated assembly lines, where delicate yet reliable gripping is essential.
Comparative Analysis: Gripper vs. Suction Cup
Grippers offer precise mechanical control and are ideal for handling irregularly shaped or heavy objects, while suction cups excel in quickly securing smooth, flat surfaces with minimal force. Grippers provide adaptability through various finger designs, enabling complex manipulation tasks, whereas suction cups rely on vacuum pressure, limiting their effectiveness on porous or textured items. Selecting between grippers and suction cups depends on application-specific requirements such as object geometry, material, and handling environment.
Precision Handling: Strengths and Limitations
Robotic grippers offer high precision handling through adjustable gripping force and tactile feedback sensors, enabling delicate manipulation of varied object shapes and sizes. Suction cups excel at handling smooth, flat surfaces with uniform suction distribution but struggle with porous or irregular textures, limiting their precision in complex tasks. Combining both tools in hybrid end-effectors enhances versatility by leveraging grippers' controlled dexterity and suction cups' efficient pick-and-place capabilities.
Material Compatibility in Robotics
Grippers provide precise mechanical engagement for handling a wide range of rigid and irregularly shaped materials, including metals, plastics, and composites, offering versatility in robotics applications. Suction cups excel at gripping smooth, non-porous surfaces such as glass, polished metals, and laminated materials, but struggle with porous or rough textures due to air leakage affecting vacuum stability. Selecting between grippers and suction cups depends on material compatibility requirements, with grippers preferred for heterogeneous or textured surfaces, while suction cups are ideal for delicate or flat items requiring gentle handling.
Speed and Efficiency Factors
Grippers offer precise control and faster response times in handling diverse objects, enhancing operational speed in complex tasks. Suction cups excel in efficiency when handling smooth, flat surfaces with minimal setup, enabling rapid pick-and-place cycles. Selecting between grippers and suction cups depends on target object properties and desired throughput in robotic automation.
Maintenance and Durability Considerations
Grippers typically require regular lubrication and mechanical inspection to prevent wear on joints and fingers, ensuring consistent gripping performance over time. Suction cups demand frequent checks for seal integrity and surface cleanliness to maintain effective vacuum pressure and prevent leaks. Durability-wise, grippers handle heavier loads and abrasive materials better, while suction cups are more prone to wear from environmental exposure and require periodic replacement of the elastomeric cups.
Cost-Benefit Analysis: Grippers vs. Suction Cups
Grippers typically offer higher precision and adaptability for complex object manipulation, making them cost-effective for tasks requiring dexterity despite a higher upfront investment. Suction cups provide a lower-cost solution with faster cycle times and minimal maintenance, ideal for handling smooth, flat surfaces in high-volume operations. Evaluating factors such as object geometry, payload weight, and operational environment is essential to maximize ROI when choosing between grippers and suction cups.
Future Trends in Robotic End Effector Technology
Future trends in robotic end effector technology emphasize the integration of adaptive grippers and advanced suction cup systems to enhance versatility and precision in automated tasks. Innovations include the development of soft robotic materials for grippers, enabling delicate object handling, and vacuum systems with smart sensors for improved grip reliability across diverse surfaces. These advancements drive improvements in manufacturing efficiency, complex assembly lines, and sectors requiring high sensitivity like electronics and food processing.
Gripper vs Suction cup Infographic