Tactile sensors detect contact, pressure, and texture by measuring localized physical interactions on a robot's surface, enabling fine manipulation and object recognition. Force-torque sensors measure multi-axis forces and torques at joints or end effectors, providing feedback for precise control of load and motion. Combining both sensors enhances robotic dexterity by offering complementary data on force distribution and interaction dynamics.
Table of Comparison
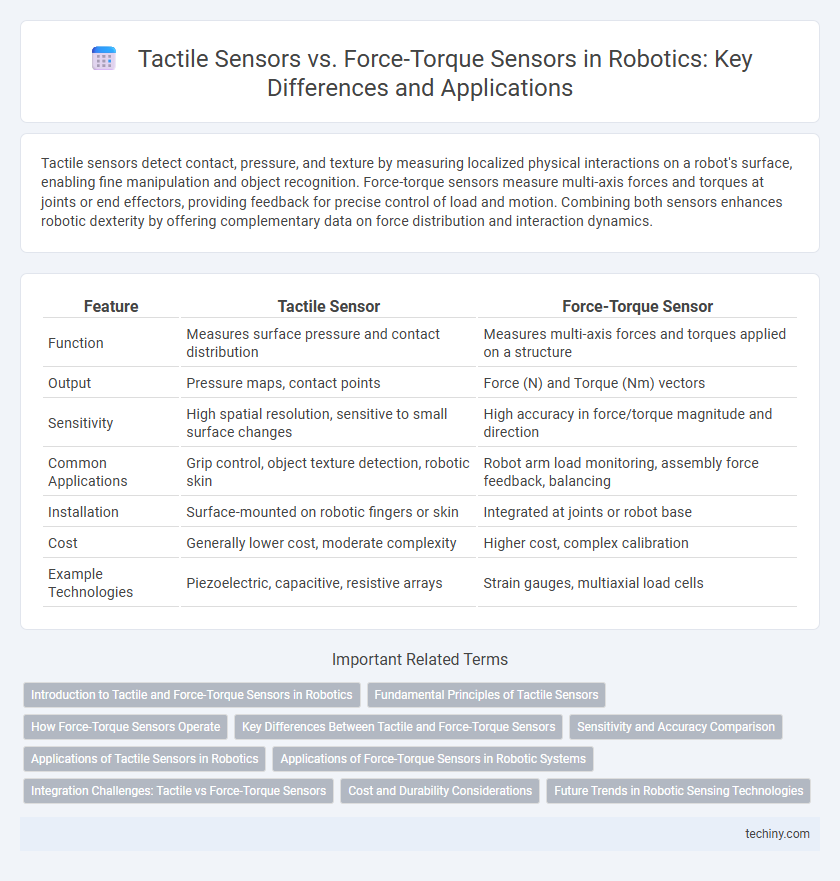
| Feature | Tactile Sensor | Force-Torque Sensor |
|---|---|---|
| Function | Measures surface pressure and contact distribution | Measures multi-axis forces and torques applied on a structure |
| Output | Pressure maps, contact points | Force (N) and Torque (Nm) vectors |
| Sensitivity | High spatial resolution, sensitive to small surface changes | High accuracy in force/torque magnitude and direction |
| Common Applications | Grip control, object texture detection, robotic skin | Robot arm load monitoring, assembly force feedback, balancing |
| Installation | Surface-mounted on robotic fingers or skin | Integrated at joints or robot base |
| Cost | Generally lower cost, moderate complexity | Higher cost, complex calibration |
| Example Technologies | Piezoelectric, capacitive, resistive arrays | Strain gauges, multiaxial load cells |
Introduction to Tactile and Force-Torque Sensors in Robotics
Tactile sensors in robotics provide localized surface information by detecting pressure, texture, and slip, enabling robots to interact delicately with objects during manipulation tasks. Force-torque sensors measure the magnitude and direction of forces and torques applied at the robot's joints or end-effector, crucial for maintaining balance, controlling grip strength, and executing precise movements. Integrating tactile and force-torque sensors enhances robotic dexterity by combining fine surface feedback with global force measurement, improving tasks such as object handling, assembly, and human-robot interaction.
Fundamental Principles of Tactile Sensors
Tactile sensors operate based on the fundamental principle of detecting physical contact and pressure distribution through various transduction methods such as piezoresistive, capacitive, and piezoelectric effects. Unlike force-torque sensors that measure global forces and moments at a robot's joint or end-effector, tactile sensors provide high-resolution spatial information about surface texture, shape, and slip by capturing localized touch signals. These sensors enable robots to perform delicate manipulations by translating mechanical stimuli into electrical signals for precise feedback control.
How Force-Torque Sensors Operate
Force-torque sensors operate by measuring the strain induced in elastic elements when external forces and torques are applied, converting mechanical deformation into electrical signals via strain gauges. These sensors capture six degrees of freedom--three forces (Fx, Fy, Fz) and three torques (Tx, Ty, Tz)--enabling precise wrench sensing critical for robotic manipulation tasks. Their ability to provide real-time, high-resolution feedback allows robots to adapt to variable load conditions and perform compliant control during interaction with uncertain environments.
Key Differences Between Tactile and Force-Torque Sensors
Tactile sensors measure localized surface pressure and texture to detect contact and slippage, enabling precise manipulation in robotic grippers. Force-torque sensors quantify multi-axis forces and torques applied to a robot's joint or end-effector, offering comprehensive force feedback for load estimation and control. The primary difference lies in tactile sensors' high spatial resolution for touch sensing versus force-torque sensors' broad range force measurement for interaction dynamics.
Sensitivity and Accuracy Comparison
Tactile sensors exhibit high sensitivity by detecting localized pressure distribution and minute surface textures, enabling precise object manipulation in robotics. Force-torque sensors provide accurate measurements of multi-axis forces and moments, ensuring reliable feedback for tasks requiring overall load assessment and dynamic interaction control. Sensory integration of tactile and force-torque data enhances robotic systems by combining detailed surface contact information with global force accuracy for superior manipulation performance.
Applications of Tactile Sensors in Robotics
Tactile sensors in robotics enable precise manipulation by providing detailed information about surface texture, pressure distribution, and object slip, crucial for tasks such as grasping fragile items or performing delicate assembly. These sensors enhance robotic dexterity in applications including prosthetics, surgical robots, and humanoid robots by offering real-time feedback for adaptive control. Unlike force-torque sensors that measure overall forces and torques at joints, tactile sensors capture localized contact events, allowing robots to interact safely and effectively with complex environments.
Applications of Force-Torque Sensors in Robotic Systems
Force-torque sensors play a crucial role in robotic systems by enabling precise measurement of forces and torques during manipulation tasks, which enhances control accuracy in assembly, machining, and interaction with unstructured environments. These sensors facilitate adaptive grasping, collision detection, and force-controlled operations, improving robot safety and efficiency in industrial automation and surgical robotics. Their integration supports advanced feedback loops for real-time adjustment, critical in tasks requiring delicate force modulation or dynamic interaction with external objects.
Integration Challenges: Tactile vs Force-Torque Sensors
Integrating tactile sensors presents challenges such as high-density wiring and complex signal processing due to their distributed arrays, whereas force-torque sensors require robust mechanical coupling and precise calibration to accurately measure multi-axis loads. Tactile sensors demand advanced algorithms for interpreting spatial pressure patterns, while force-torque sensors focus on dynamic range and sensitivity to load variations. Both sensor types necessitate careful consideration of real-time data fusion and alignment within robotic control systems for effective haptic feedback and manipulation.
Cost and Durability Considerations
Tactile sensors generally offer lower initial costs compared to force-torque sensors, making them more suitable for budget-conscious robotics applications. Force-torque sensors, while more expensive, provide higher durability and precision in measuring multi-axis forces and moments, essential for heavy-duty industrial robots. Cost-efficiency of tactile sensors is offset by their limited lifespan and sensitivity to wear, whereas force-torque sensors endure harsh environments longer, justifying their higher investment.
Future Trends in Robotic Sensing Technologies
Advancements in tactile sensors emphasize enhanced sensitivity and spatial resolution to replicate human touch, enabling precise manipulation and object recognition in robotics. Force-torque sensors are evolving with improved miniaturization and multi-axis measurement capabilities, facilitating dynamic interaction and adaptive control in complex environments. Future trends include integrating AI-driven data processing with these sensors to achieve real-time feedback and autonomous decision-making in robotic systems.
Tactile sensor vs force-torque sensor Infographic