Velocity control in robotics prioritizes the regulation of speed and acceleration to ensure smooth and precise motion, ideal for tasks requiring dynamic response and adaptability. Position control focuses on achieving and maintaining accurate endpoint placement, making it essential for applications demanding high precision and repeatability. Selecting between velocity and position control depends on the robot's operational requirements, balancing speed, accuracy, and task complexity.
Table of Comparison
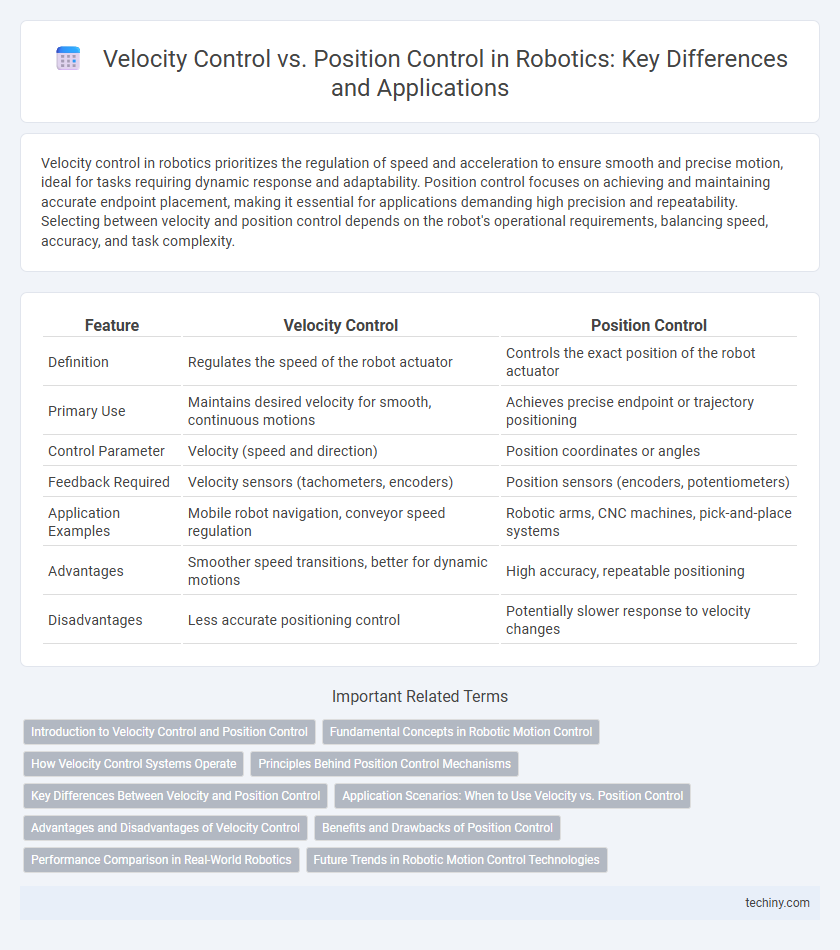
| Feature | Velocity Control | Position Control |
|---|---|---|
| Definition | Regulates the speed of the robot actuator | Controls the exact position of the robot actuator |
| Primary Use | Maintains desired velocity for smooth, continuous motions | Achieves precise endpoint or trajectory positioning |
| Control Parameter | Velocity (speed and direction) | Position coordinates or angles |
| Feedback Required | Velocity sensors (tachometers, encoders) | Position sensors (encoders, potentiometers) |
| Application Examples | Mobile robot navigation, conveyor speed regulation | Robotic arms, CNC machines, pick-and-place systems |
| Advantages | Smoother speed transitions, better for dynamic motions | High accuracy, repeatable positioning |
| Disadvantages | Less accurate positioning control | Potentially slower response to velocity changes |
Introduction to Velocity Control and Position Control
Velocity control in robotics involves regulating the speed of a robot's joints or end-effector to achieve smooth and responsive motion, enhancing precision in tasks requiring dynamic adjustments. Position control focuses on accurately achieving and maintaining specific coordinates or angles, ensuring the robotic system follows predefined paths with minimal error. Both control methods are fundamental in robotic manipulators, where velocity control optimizes motion fluidity and position control guarantees spatial accuracy.
Fundamental Concepts in Robotic Motion Control
Velocity control in robotics involves regulating the speed and direction of robot joints or end-effectors, ensuring smooth and continuous motion. Position control focuses on accurately reaching and maintaining specific locations, critical for tasks requiring precision placement or trajectory tracking. Understanding these fundamental concepts enables effective manipulation of robotic motion, balancing dynamic response and positional accuracy.
How Velocity Control Systems Operate
Velocity control systems in robotics regulate the speed of a robot's motors by continuously adjusting motor input based on feedback from encoders or tachometers. These systems implement closed-loop control algorithms such as PID controllers to maintain desired velocities despite load changes or external disturbances. Precise velocity control enhances smooth motion, improves task accuracy, and ensures stable dynamic response in robotic applications.
Principles Behind Position Control Mechanisms
Position control mechanisms in robotics rely on precise feedback loops and sensor data to adjust the robot's actuators, ensuring accurate movement to a predefined target. These systems use encoders or resolvers to continuously monitor the current position, comparing it with the desired reference to minimize error through corrective adjustments. The underlying principle focuses on maintaining stability, accuracy, and responsiveness by dynamically modulating actuator commands based on positional discrepancies rather than velocity alone.
Key Differences Between Velocity and Position Control
Velocity control in robotics regulates the speed at which a robot's actuator moves, prioritizing smooth and consistent motion for dynamic tasks, while position control ensures the robot reaches a specific location or angle with high accuracy. Velocity control is essential in applications requiring continuous movement such as conveyor systems, whereas position control is critical in tasks demanding precise end-point placement like robotic arm assembly. The key differences lie in their feedback loops, with velocity control relying on speed sensors and position control utilizing encoders or potentiometers to achieve optimal performance.
Application Scenarios: When to Use Velocity vs. Position Control
Velocity control excels in applications requiring smooth, continuous motion such as conveyor systems, autonomous vehicles, and robotic arms performing dynamic tasks. Position control is ideal for precision tasks like pick-and-place operations, assembly lines, and CNC machining where exact positioning is critical. Selecting between velocity and position control depends on the need for speed regulation versus spatial accuracy in robotic movements.
Advantages and Disadvantages of Velocity Control
Velocity control in robotics offers precise management of motor speed, enabling smooth and responsive robot movements ideal for tasks requiring consistent velocity. This control strategy enhances system stability and reduces overshoot compared to position control, making it suitable for applications involving continuous or cyclical motion. However, its reliance on accurate velocity sensors and sensitivity to load variations can introduce complexity and potential instability in dynamic or high-precision positioning tasks.
Benefits and Drawbacks of Position Control
Position control in robotics offers precise endpoint accuracy essential for tasks requiring exact placement, such as assembly or surgery. However, its reliance on fixed reference points can limit adaptability in dynamic environments and reduce responsiveness to sudden external forces. This method tends to require complex calibration and tuning to maintain stability, increasing implementation complexity compared to velocity control.
Performance Comparison in Real-World Robotics
Velocity control in robotics enables smoother and more responsive motion adjustments, making it ideal for tasks requiring continuous speed modulation. Position control excels in precision-demanding applications, ensuring accurate endpoint placement but often experiencing slower response times. Real-world performance often favors velocity control for dynamic environments, whereas position control is preferred in high-accuracy assembly or pick-and-place operations.
Future Trends in Robotic Motion Control Technologies
Future trends in robotic motion control technologies emphasize the integration of velocity control with real-time adaptive algorithms to enhance precision and responsiveness in dynamic environments. Advanced sensor fusion and AI-driven predictive models enable seamless transitions between position control and velocity control, optimizing energy efficiency and task accuracy. Emerging developments in hardware, such as high-performance actuators and low-latency communication protocols, support these sophisticated control strategies for next-generation autonomous robots.
velocity control vs position control Infographic