Task-level planning in robotics involves determining the sequence of high-level actions needed to achieve a goal, while motion-level planning focuses on generating precise trajectories and control commands for robot movements. Task planning addresses what the robot should do, such as picking up objects or assembling parts, whereas motion planning handles how these actions are physically executed within the robot's environment. Integrating both planning levels enhances robot efficiency and adaptability in complex tasks.
Table of Comparison
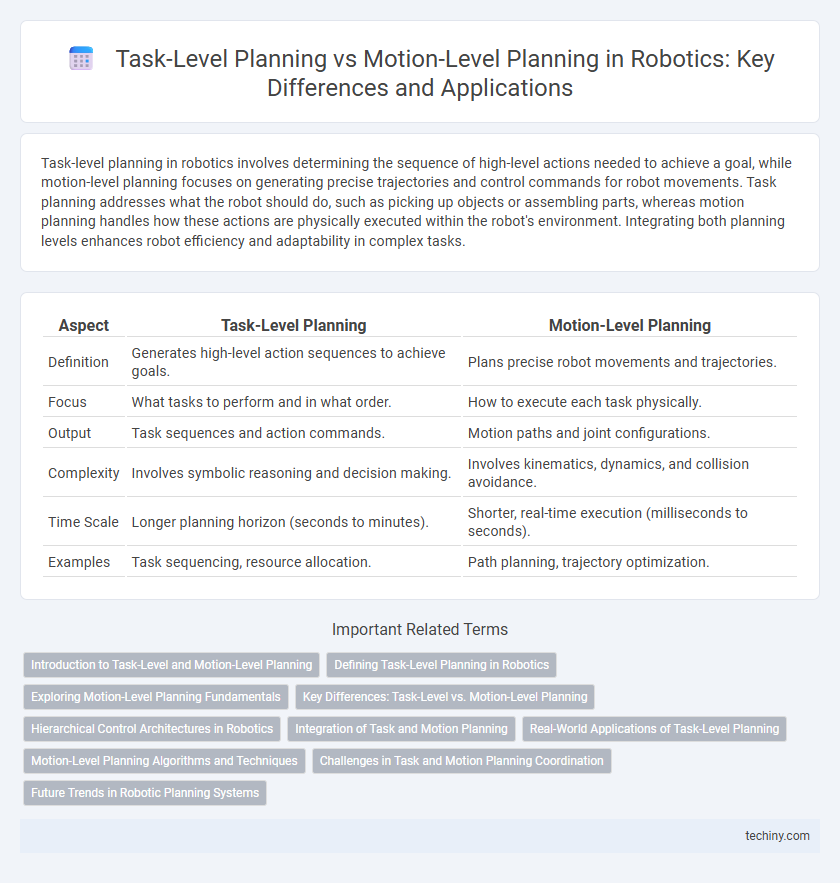
| Aspect | Task-Level Planning | Motion-Level Planning |
|---|---|---|
| Definition | Generates high-level action sequences to achieve goals. | Plans precise robot movements and trajectories. |
| Focus | What tasks to perform and in what order. | How to execute each task physically. |
| Output | Task sequences and action commands. | Motion paths and joint configurations. |
| Complexity | Involves symbolic reasoning and decision making. | Involves kinematics, dynamics, and collision avoidance. |
| Time Scale | Longer planning horizon (seconds to minutes). | Shorter, real-time execution (milliseconds to seconds). |
| Examples | Task sequencing, resource allocation. | Path planning, trajectory optimization. |
Introduction to Task-Level and Motion-Level Planning
Task-level planning in robotics focuses on high-level decision making, defining sequences of actions to achieve specific goals, while motion-level planning emphasizes generating precise trajectories for robot movements to execute those tasks. Task planners use symbolic representations and logic-based frameworks to structure complex missions, whereas motion planners rely on geometric algorithms and kinematic constraints to navigate the robot's environment. Integrating both levels ensures efficient and feasible robotic operations, enabling the transition from strategic objectives to executable motions.
Defining Task-Level Planning in Robotics
Task-level planning in robotics involves defining a sequence of high-level actions or tasks that a robot must execute to achieve a specific goal, such as assembling components or navigating complex environments. This planning stage focuses on decision-making processes that consider objectives, constraints, and resource allocation, abstracted from the robot's physical movements. It translates user intents or mission goals into actionable tasks before lower-level motion planning generates precise path trajectories and control signals.
Exploring Motion-Level Planning Fundamentals
Motion-level planning in robotics focuses on generating feasible trajectories that ensure smooth, collision-free movements of robotic manipulators or mobile robots within dynamic environments. It involves kinematic and dynamic constraints to optimize the robot's path, velocity, and acceleration for efficient task execution. Key algorithms like Rapidly-exploring Random Trees (RRT) and Probabilistic Roadmaps (PRM) are foundational in solving high-dimensional motion planning problems.
Key Differences: Task-Level vs. Motion-Level Planning
Task-level planning in robotics focuses on high-level decision making, determining the sequence of actions or goals the robot must achieve to complete a task. Motion-level planning, however, addresses the detailed control of the robot's movements, such as trajectory generation and collision avoidance within the robot's environment. The key difference lies in abstraction: task-level planning deals with "what" to do, while motion-level planning defines "how" to do it precisely.
Hierarchical Control Architectures in Robotics
Hierarchical control architectures in robotics effectively separate task-level planning, which defines the sequence of high-level actions to achieve goals, from motion-level planning, responsible for generating precise trajectories and motor commands. Task-level planning leverages symbolic reasoning and decision-making frameworks to manage complex objectives, while motion-level planning utilizes kinematic and dynamic models to ensure smooth, collision-free movements. This layered approach enhances modularity, scalability, and real-time responsiveness in robotic systems, enabling efficient execution of sophisticated tasks.
Integration of Task and Motion Planning
Task-level planning focuses on high-level decision-making, specifying sequences of actions to achieve goals, while motion-level planning handles the geometric and kinematic aspects for executing those actions. Integration of task and motion planning (TAMP) enables robots to generate feasible plans that satisfy both symbolic task constraints and physical motion requirements, enhancing efficiency and robustness in complex environments. Advanced algorithms in TAMP leverage combinatorial search and continuous optimization to address the interdependencies between discrete task sequences and continuous motion trajectories.
Real-World Applications of Task-Level Planning
Task-level planning in robotics involves sequencing high-level actions needed to achieve complex goals, essential for applications like autonomous warehouse management and service robots in dynamic environments. These plans enable robots to decide which tasks to perform and in what order, optimizing resource allocation and operational efficiency. Real-world implementations demonstrate improved adaptability and scalability compared to solely motion-level planning, which focuses on the physical execution of individual movements.
Motion-Level Planning Algorithms and Techniques
Motion-level planning algorithms in robotics focus on generating collision-free trajectories and optimizing robot movements within constrained environments. Techniques such as Rapidly-exploring Random Trees (RRT), Probabilistic Roadmaps (PRM), and Dynamic Window Approach (DWA) enable real-time path refinement and obstacle avoidance. These algorithms prioritize smoothness, speed, and safety by solving kinematic and dynamic constraints for manipulators or mobile robots.
Challenges in Task and Motion Planning Coordination
Task-level planning in robotics involves high-level decision-making about sequences of actions to achieve goals, while motion-level planning focuses on generating feasible trajectories for robot movements. Challenges in coordinating these layers include managing the combinatorial explosion of possible task sequences alongside continuous motion constraints, ensuring real-time responsiveness, and maintaining robustness amidst environmental uncertainties. Effective integration requires sophisticated algorithms that handle symbolic reasoning and geometric computations simultaneously to optimize both task feasibility and motion safety.
Future Trends in Robotic Planning Systems
Future trends in robotic planning systems emphasize the integration of task-level planning with real-time motion-level adjustments to enhance adaptability in dynamic environments. Advances in AI-driven algorithms and machine learning enable robots to predict and optimize combined task execution and motion trajectories, increasing efficiency and safety. Emerging frameworks focus on hierarchical planning models that seamlessly coordinate high-level goals with low-level motor commands for autonomous decision-making.
task-level planning vs motion-level planning Infographic