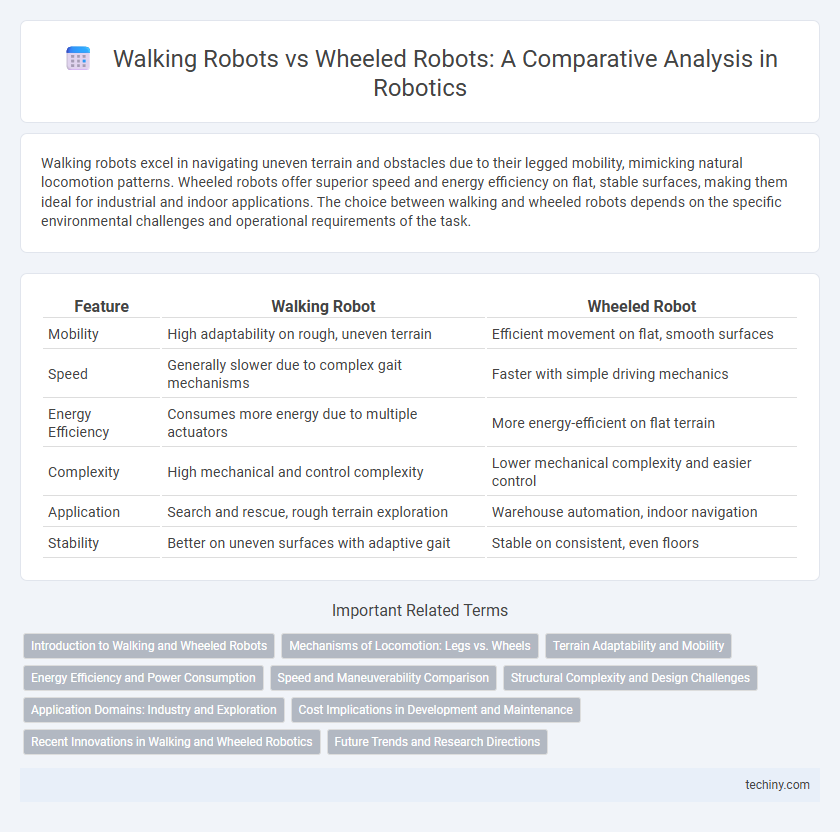
Walking robots excel in navigating uneven terrain and obstacles due to their legged mobility, mimicking natural locomotion patterns. Wheeled robots offer superior speed and energy efficiency on flat, stable surfaces, making them ideal for industrial and indoor applications. The choice between walking and wheeled robots depends on the specific environmental challenges and operational requirements of the task.
Table of Comparison
| Feature | Walking Robot | Wheeled Robot |
|---|---|---|
| Mobility | High adaptability on rough, uneven terrain | Efficient movement on flat, smooth surfaces |
| Speed | Generally slower due to complex gait mechanisms | Faster with simple driving mechanics |
| Energy Efficiency | Consumes more energy due to multiple actuators | More energy-efficient on flat terrain |
| Complexity | High mechanical and control complexity | Lower mechanical complexity and easier control |
| Application | Search and rescue, rough terrain exploration | Warehouse automation, indoor navigation |
| Stability | Better on uneven surfaces with adaptive gait | Stable on consistent, even floors |
Introduction to Walking and Wheeled Robots
Walking robots mimic the locomotion of legged animals, enabling navigation over uneven terrain and obstacles with high adaptability. Wheeled robots use rotational movement of wheels for faster and more energy-efficient travel on flat surfaces, offering superior speed and stability. Understanding the differences in mobility mechanisms is essential for optimizing robot design according to specific environmental conditions and tasks.
Mechanisms of Locomotion: Legs vs. Wheels
Walking robots utilize articulated legs that mimic biological locomotion, enabling them to navigate uneven terrains and obstacles with adaptive gait patterns. Wheeled robots rely on rotational wheels, providing efficient, high-speed movement on flat, smooth surfaces but limited versatility in complex environments. The choice between legged and wheeled mechanisms significantly impacts energy consumption, stability, and terrain adaptability in robotic locomotion design.
Terrain Adaptability and Mobility
Walking robots excel in terrain adaptability by mimicking biological locomotion, allowing them to navigate uneven, rocky, or slippery surfaces with stability and precision. Wheeled robots offer superior speed and energy efficiency on flat, smooth surfaces but struggle with obstacles and irregular terrains due to limited ground contact points. Advanced walking robots utilize multi-joint legs and real-time balance algorithms to overcome complex environments where wheeled robots face mobility constraints.
Energy Efficiency and Power Consumption
Walking robots generally consume more power due to complex joint actuations and balance control, making their energy efficiency lower compared to wheeled robots. Wheeled robots benefit from continuous ground contact and minimal mechanical complexity, resulting in reduced friction and improved energy conservation during locomotion. Energy consumption data indicates wheeled robots can use up to 70% less power on flat terrain, optimizing battery life for extended operational periods.
Speed and Maneuverability Comparison
Walking robots generally exhibit superior maneuverability over wheeled robots due to their ability to navigate uneven terrain and obstacles. Wheeled robots typically achieve higher speeds on flat and smooth surfaces, often exceeding 10 km/h, whereas walking robots usually operate at slower speeds around 1-3 km/h. The trade-off between speed and agility is crucial in robotics, with wheeled designs favoring rapid transit and walking robots excelling in complex, unstructured environments.
Structural Complexity and Design Challenges
Walking robots exhibit greater structural complexity due to their multi-jointed limbs, requiring advanced balance algorithms and precise actuator coordination to mimic natural gait. Wheeled robots benefit from simpler mechanical design and fewer moving parts, reducing maintenance and energy consumption but sacrificing versatility on uneven terrain. Designing walking robots demands intricate sensor integration and robust control systems to manage dynamic stability, presenting significant engineering challenges compared to wheeled counterparts.
Application Domains: Industry and Exploration
Walking robots excel in uneven terrain navigation, making them ideal for exploration tasks such as planetary surface analysis and disaster site inspection, where mobility over irregular surfaces is crucial. Wheeled robots provide high efficiency and speed on flat surfaces, making them well-suited for industrial automation in warehouses and assembly lines. The choice between walking and wheeled robots depends heavily on the operational environment and task-specific requirements in both industry and exploration domains.
Cost Implications in Development and Maintenance
Walking robots generally incur higher development costs due to their complex mechanical design and advanced control systems required for stability and terrain adaptation. Maintenance expenses also tend to be greater because of the numerous moving joints and sensors that demand frequent calibration and replacement. In contrast, wheeled robots offer lower initial and ongoing costs, benefiting from simpler mechanics and well-established manufacturing processes, making them more cost-effective for flat, structured environments.
Recent Innovations in Walking and Wheeled Robotics
Recent innovations in walking robots include the integration of advanced balance sensors and AI-driven gait algorithms, enabling improved adaptability over uneven terrain and enhanced obstacle negotiation. Wheeled robots have seen breakthroughs in omnidirectional wheel designs and energy-efficient motor systems, boosting maneuverability and operational range in industrial and urban environments. Both types benefit from state-of-the-art materials and real-time sensor fusion, expanding their applications across diverse sectors such as delivery, healthcare, and search-and-rescue missions.
Future Trends and Research Directions
Future trends in walking robots emphasize enhanced mobility and adaptability for complex terrains, leveraging advances in biomechanical design and AI-driven control systems. Research directions prioritize energy efficiency, balance optimization, and integration of sensor fusion to improve environmental interaction and autonomy. Wheeled robots continue to evolve with developments in terrain-adaptive wheels and hybrid locomotion, yet walking robots dominate studies aiming at versatile navigation in unstructured environments.
walking robot vs wheeled robot Infographic