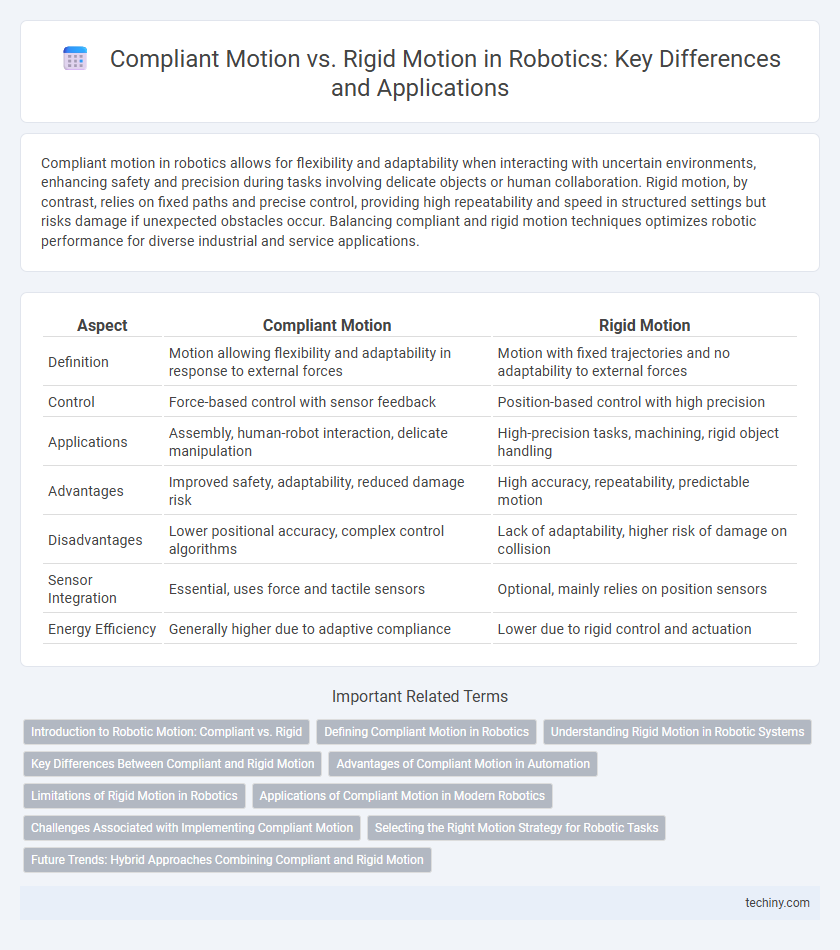
Compliant motion in robotics allows for flexibility and adaptability when interacting with uncertain environments, enhancing safety and precision during tasks involving delicate objects or human collaboration. Rigid motion, by contrast, relies on fixed paths and precise control, providing high repeatability and speed in structured settings but risks damage if unexpected obstacles occur. Balancing compliant and rigid motion techniques optimizes robotic performance for diverse industrial and service applications.
Table of Comparison
| Aspect | Compliant Motion | Rigid Motion |
|---|---|---|
| Definition | Motion allowing flexibility and adaptability in response to external forces | Motion with fixed trajectories and no adaptability to external forces |
| Control | Force-based control with sensor feedback | Position-based control with high precision |
| Applications | Assembly, human-robot interaction, delicate manipulation | High-precision tasks, machining, rigid object handling |
| Advantages | Improved safety, adaptability, reduced damage risk | High accuracy, repeatability, predictable motion |
| Disadvantages | Lower positional accuracy, complex control algorithms | Lack of adaptability, higher risk of damage on collision |
| Sensor Integration | Essential, uses force and tactile sensors | Optional, mainly relies on position sensors |
| Energy Efficiency | Generally higher due to adaptive compliance | Lower due to rigid control and actuation |
Introduction to Robotic Motion: Compliant vs. Rigid
Compliant motion in robotics allows robots to adapt their movements based on external forces, enhancing safety and precision in dynamic environments, while rigid motion follows fixed trajectories without deviation. Compliant systems use sensors and adaptive control algorithms to accommodate variability and minimize mechanical stress. This contrast is crucial for applications requiring interaction with unpredictable surroundings or delicate objects.
Defining Compliant Motion in Robotics
Compliant motion in robotics refers to the controlled flexibility and adaptability of a robot's movements when interacting with uncertain or dynamic environments. Unlike rigid motion, which involves fixed trajectories and stiff actuations, compliant motion allows a robot to absorb external forces and adjust its path, enhancing safety and precision in tasks such as assembly, human-robot collaboration, and force-sensitive manipulation. Advanced control algorithms and sensor feedback systems are essential for achieving effective compliance in robotic applications.
Understanding Rigid Motion in Robotic Systems
Rigid motion in robotic systems refers to movements where the robot's structure maintains a fixed shape and orientation, ensuring precise and predictable positioning of end-effectors. This form of motion relies on stiff control algorithms and solid mechanical linkages to resist external forces, enabling tasks that require high accuracy and repeatability. Understanding rigid motion is essential for applications like assembly and machining, where deviations can lead to defects or failures.
Key Differences Between Compliant and Rigid Motion
Compliant motion in robotics involves adaptive, flexible interaction with the environment, allowing robots to absorb forces and adjust position dynamically, whereas rigid motion relies on fixed trajectories and stiff control for precise, repeatable movements. Key differences include force sensitivity, where compliant systems use sensors and control algorithms to modulate applied forces, enhancing safety and dexterity, while rigid systems maintain constant force outputs for stability. This distinction influences applications, with compliant motion favored in assembly or human-robot collaboration, and rigid motion preferred for tasks requiring exact positioning and high-speed execution.
Advantages of Compliant Motion in Automation
Compliant motion in automation offers significant advantages by enhancing robot adaptability and safety when interacting with dynamic or unpredictable environments. It enables better force control and absorption of impact, reducing stress on mechanical components and minimizing the risk of damage during tasks. This flexibility improves precision in assembly processes and lowers maintenance costs compared to rigid motion systems.
Limitations of Rigid Motion in Robotics
Rigid motion in robotics often leads to limited adaptability when interacting with unpredictable environments, resulting in potential damage to both the robot and its surroundings. The lack of flexibility in rigid systems causes challenges in tasks requiring delicate force control or safe human-robot collaboration. High precision in rigid motion is achieved at the expense of responsiveness and compliance, restricting performance in dynamic and unstructured settings.
Applications of Compliant Motion in Modern Robotics
Compliant motion in modern robotics enables precise interaction with dynamic environments by allowing robots to adapt to external forces, crucial for delicate tasks like assembly, surgery, and human-robot collaboration. Unlike rigid motion, compliant control improves safety and efficiency in applications such as prosthetics, automated material handling, and soft robotics. This adaptability enhances performance in unstructured settings where traditional rigid robots may struggle.
Challenges Associated with Implementing Compliant Motion
Implementing compliant motion in robotics presents challenges such as precise force control, which requires advanced sensors and real-time feedback systems to adapt to unstructured environments. Achieving stability during interaction with unpredictable external forces demands sophisticated algorithms and tuning to prevent oscillations or drift. Integrating compliant motion also increases computational complexity and necessitates robust hardware capable of handling variable stiffness without compromising precision or speed.
Selecting the Right Motion Strategy for Robotic Tasks
Selecting the right motion strategy for robotic tasks depends on task requirements, environmental interaction, and precision levels. Compliant motion enables robots to adapt to uncertainties and absorb external forces, making it ideal for delicate assembly or human-robot collaboration. Rigid motion provides high accuracy and repeatability for tasks requiring strict positional control, such as machining or pick-and-place operations in structured environments.
Future Trends: Hybrid Approaches Combining Compliant and Rigid Motion
Future trends in robotics emphasize hybrid approaches combining compliant and rigid motion to enhance adaptability and precision in dynamic environments. These approaches utilize advanced sensor integration and real-time control algorithms to switch seamlessly between stiffness and flexibility based on task demands. The fusion of compliant mechanisms with rigid actuators enables robots to perform complex manipulation tasks with improved safety and efficiency in human-robot collaboration.
Compliant motion vs rigid motion Infographic