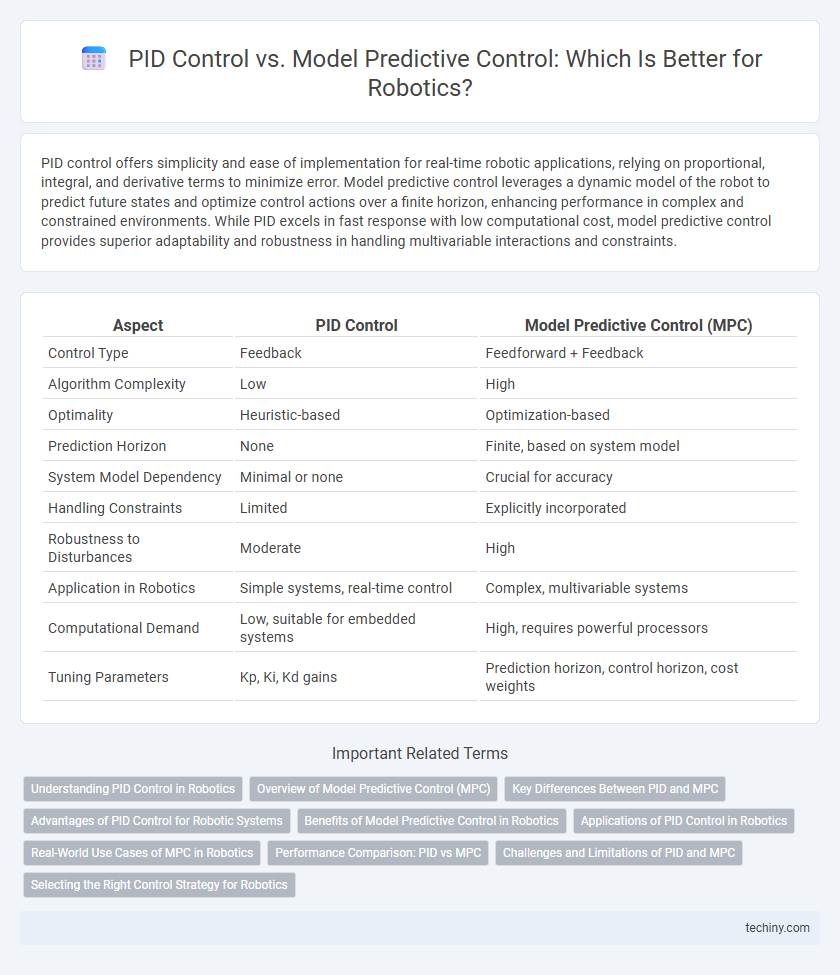
PID control offers simplicity and ease of implementation for real-time robotic applications, relying on proportional, integral, and derivative terms to minimize error. Model predictive control leverages a dynamic model of the robot to predict future states and optimize control actions over a finite horizon, enhancing performance in complex and constrained environments. While PID excels in fast response with low computational cost, model predictive control provides superior adaptability and robustness in handling multivariable interactions and constraints.
Table of Comparison
| Aspect | PID Control | Model Predictive Control (MPC) |
|---|---|---|
| Control Type | Feedback | Feedforward + Feedback |
| Algorithm Complexity | Low | High |
| Optimality | Heuristic-based | Optimization-based |
| Prediction Horizon | None | Finite, based on system model |
| System Model Dependency | Minimal or none | Crucial for accuracy |
| Handling Constraints | Limited | Explicitly incorporated |
| Robustness to Disturbances | Moderate | High |
| Application in Robotics | Simple systems, real-time control | Complex, multivariable systems |
| Computational Demand | Low, suitable for embedded systems | High, requires powerful processors |
| Tuning Parameters | Kp, Ki, Kd gains | Prediction horizon, control horizon, cost weights |
Understanding PID Control in Robotics
PID control in robotics involves using proportional, integral, and derivative terms to minimize the error between a desired setpoint and the actual robot position or velocity. It offers simplicity and real-time responsiveness, making it effective for systems with well-defined dynamics and low computational requirements. Unlike Model Predictive Control, PID does not require a predictive model, which limits its performance in handling multi-variable constraints and future state predictions.
Overview of Model Predictive Control (MPC)
Model Predictive Control (MPC) is an advanced control strategy that uses a dynamic model of the robotic system to predict future behavior and optimize control inputs over a finite horizon. Unlike PID control, MPC handles multivariable constraints and nonlinearities by solving an optimization problem at each control step, providing more precise and adaptive regulation. MPC's ability to incorporate system constraints and anticipate future events makes it ideal for complex robotic applications requiring high performance and stability.
Key Differences Between PID and MPC
PID control relies on feedback from current and past errors to adjust motor commands, offering simplicity and ease of implementation in robotics. Model Predictive Control (MPC) uses a dynamic model to predict future system behavior and optimize control inputs over a defined horizon, enabling handling of multivariable systems and constraints. Unlike PID's reactive approach, MPC provides proactive control strategies, improving performance in complex, nonlinear robotic tasks.
Advantages of PID Control for Robotic Systems
PID control offers simplicity and ease of implementation, making it highly effective for real-time robotic systems that require fast and reliable response. Its low computational demand allows for precise control of motors and actuators in embedded systems with limited processing power. Widely supported in industrial applications, PID controllers provide robust performance for position, speed, and torque control under varying operating conditions.
Benefits of Model Predictive Control in Robotics
Model Predictive Control (MPC) offers significant advantages in robotics by explicitly handling multivariable constraints and optimizing control actions over a future horizon, leading to improved trajectory tracking and robustness against disturbances. Unlike PID control, MPC can incorporate dynamic models of robotic systems to anticipate and mitigate complex nonlinearities and uncertainties. This predictive capability enhances the accuracy and efficiency of motion planning, especially in high-precision and rapidly changing environments.
Applications of PID Control in Robotics
PID control is widely used in robotics for applications requiring precise position, speed, and torque regulation due to its simplicity and reliability. Common implementations include robotic arm joint control, mobile robot velocity regulation, and balancing of two-wheeled robots. Its ability to provide real-time error correction allows efficient handling of nonlinearities and disturbances in robotic systems with relatively low computational cost.
Real-World Use Cases of MPC in Robotics
Model Predictive Control (MPC) excels in robotics by handling multivariable systems with constraints, enabling precise trajectory planning and obstacle avoidance in autonomous vehicles and robotic arms. Unlike PID control, which is effective for simple, linear and single-input systems, MPC anticipates future states by solving optimization problems in real-time, improving performance in dynamic environments. Real-world applications of MPC include drone flight stabilization, mobile robot navigation in cluttered spaces, and industrial robot manipulators performing complex tasks with high accuracy and safety margins.
Performance Comparison: PID vs MPC
PID control offers simplicity and fast response in robotic systems but often struggles with complex, multi-variable processes and constraints. Model Predictive Control (MPC) excels in handling multi-input multi-output systems by optimizing future control actions based on system models, resulting in improved accuracy and constraint management. Performance comparisons show MPC outperforming PID in trajectory tracking, disturbance rejection, and energy efficiency, especially in nonlinear and dynamic environments.
Challenges and Limitations of PID and MPC
PID control faces challenges in handling multivariable systems and constraints, often leading to overshoot and instability under non-linear or time-varying dynamics. Model Predictive Control (MPC) demands high computational resources and accurate system models, limiting its real-time application in fast-changing robotic environments. Both methods struggle with uncertainties, but MPC offers better constraint management while PID's simplicity restricts adaptability to complex robotic tasks.
Selecting the Right Control Strategy for Robotics
PID control offers simplicity and robustness in robotics, making it ideal for systems with well-understood dynamics and limited computational resources. Model Predictive Control (MPC) excels in handling multi-variable systems with constraints, optimizing performance by predicting future states using dynamic models. Choosing between PID and MPC depends on the robot's operational complexity, real-time processing capabilities, and the need for predictive accuracy in achieving precise motion control.
PID control vs Model predictive control Infographic