Actuator saturation limits the maximum output of a robotic actuator, causing performance degradation when control signals exceed physical constraints. Deadzone compensation addresses the non-responsive range of an actuator around zero input, improving precision by adjusting control commands to overcome static friction or backlash. Effective integration of both techniques enhances robotic motion accuracy and responsiveness in dynamic environments.
Table of Comparison
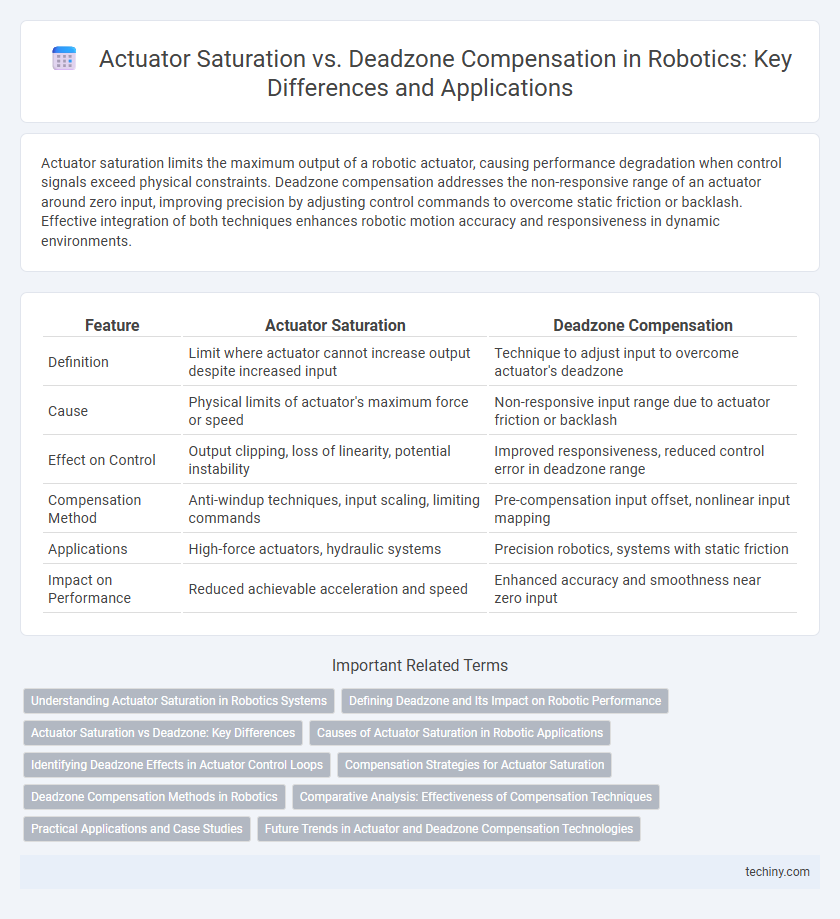
| Feature | Actuator Saturation | Deadzone Compensation |
|---|---|---|
| Definition | Limit where actuator cannot increase output despite increased input | Technique to adjust input to overcome actuator's deadzone |
| Cause | Physical limits of actuator's maximum force or speed | Non-responsive input range due to actuator friction or backlash |
| Effect on Control | Output clipping, loss of linearity, potential instability | Improved responsiveness, reduced control error in deadzone range |
| Compensation Method | Anti-windup techniques, input scaling, limiting commands | Pre-compensation input offset, nonlinear input mapping |
| Applications | High-force actuators, hydraulic systems | Precision robotics, systems with static friction |
| Impact on Performance | Reduced achievable acceleration and speed | Enhanced accuracy and smoothness near zero input |
Understanding Actuator Saturation in Robotics Systems
Actuator saturation in robotics occurs when the input command exceeds the physical limits of the actuator, causing output signals to clamp at maximum or minimum values. This phenomenon leads to reduced control precision and potential instability in robotic systems, impacting tasks that require fine motor adjustments. Deadzone compensation techniques help mitigate the adverse effects of actuator saturation by adjusting control inputs to maintain smoother actuator performance within operational bounds.
Defining Deadzone and Its Impact on Robotic Performance
Deadzone in robotics refers to a range of input signals where the actuator output remains zero, causing a delay or loss in response. This phenomenon severely impacts robotic precision and control, leading to reduced accuracy in position or force adjustments. Effective deadzone compensation is crucial to enhance actuator performance and maintain smooth, reliable robot motion.
Actuator Saturation vs Deadzone: Key Differences
Actuator saturation occurs when an actuator reaches its maximum or minimum output limit, causing a plateau in response despite further control input, whereas deadzone refers to a range of input signals where no actuator movement occurs. Saturation often results in output clipping and potential control instability, while deadzone causes a delay or insensitivity in response at low input levels. Effective compensation strategies for saturation include anti-windup techniques, whereas deadzone compensation requires threshold adjustment to restore actuator responsiveness.
Causes of Actuator Saturation in Robotic Applications
Actuator saturation in robotic applications primarily results from exceeding the physical or electrical limits of the actuator, such as maximum torque, voltage, or current constraints. Mechanical factors like friction, stiction, and load variations contribute to saturation by demanding forces beyond actuator capacity. Thermal effects and power supply limitations also restrict actuator performance, leading to saturation and necessitating deadzone compensation for accurate control.
Identifying Deadzone Effects in Actuator Control Loops
Identifying deadzone effects in actuator control loops requires precise measurement of input-output nonlinearities where actuator output remains unchanged despite varying inputs within a threshold. Actuator saturation occurs when the control signal exceeds the actuator's physical limits, while deadzones cause a loss of responsiveness around zero input, impairing control accuracy and stability. Advanced compensation techniques use adaptive algorithms and feedback linearization to mitigate deadzone hysteresis and restore precise actuator behavior in robotics applications.
Compensation Strategies for Actuator Saturation
Compensation strategies for actuator saturation focus on preventing nonlinear performance degradation by implementing adaptive control algorithms and anti-windup schemes that mitigate the effects of input constraints. Model-based predictive control techniques anticipate saturation events, adjusting control signals proactively to maintain system stability and responsiveness. These strategies enhance actuator efficiency and accuracy, ensuring robust robotic motion even under limited actuator output conditions.
Deadzone Compensation Methods in Robotics
Deadzone compensation methods in robotics address the nonlinear behavior caused by actuator deadzones, which result in a region where input commands produce no output movement. Common strategies include model-based inversion, adaptive control, and observer-based techniques, which estimate and counteract the deadzone effect to enhance actuator precision and system stability. These compensation methods improve motion accuracy, reduce control errors, and enable smoother robotic manipulations in applications requiring high fidelity.
Comparative Analysis: Effectiveness of Compensation Techniques
Actuator saturation limits the maximum output achievable by a robotic system, causing performance degradation when control commands exceed physical boundaries, whereas deadzone compensation addresses input insensitivity regions where minor commands fail to trigger actuator response. Comparative analysis reveals that deadzone compensation techniques, such as inverse deadzone mapping, significantly improve low-level control accuracy, while saturation compensation strategies like anti-windup schemes mitigate signal clipping effects in high-demand scenarios. Effective integration of both methods enhances overall robotic actuator precision by balancing response linearity and preventing command signal distortion.
Practical Applications and Case Studies
Actuator saturation and deadzone compensation critically impact robotic precision and control efficiency in practical applications such as robotic arms and autonomous vehicles. Case studies demonstrate that implementing advanced deadzone compensation techniques significantly enhances actuator responsiveness, reducing errors caused by nonlinearities and improving overall system stability. Optimizing these control strategies enables robust performance in high-precision tasks, such as industrial automation and surgical robotics.
Future Trends in Actuator and Deadzone Compensation Technologies
Emerging trends in actuator and deadzone compensation technologies emphasize the integration of adaptive control algorithms and machine learning to enhance real-time responsiveness and precision. Innovations in smart materials, such as piezoelectric and shape memory alloys, enable actuators to operate with reduced saturation effects while compensating for deadzone nonlinearities more effectively. Advanced sensor fusion techniques and embedded AI systems facilitate continuous calibration and predictive maintenance, driving future robotics toward higher efficiency and reliability.
Actuator saturation vs Deadzone compensation Infographic