Centralized control in robotics relies on a single processing unit to manage all system operations, offering streamlined decision-making but posing risks of a single point of failure. Distributed control disperses processing across multiple controllers, enhancing system robustness and scalability by allowing local decision-making. Balancing centralized and distributed control architectures is crucial for optimizing performance, fault tolerance, and adaptability in complex robotic systems.
Table of Comparison
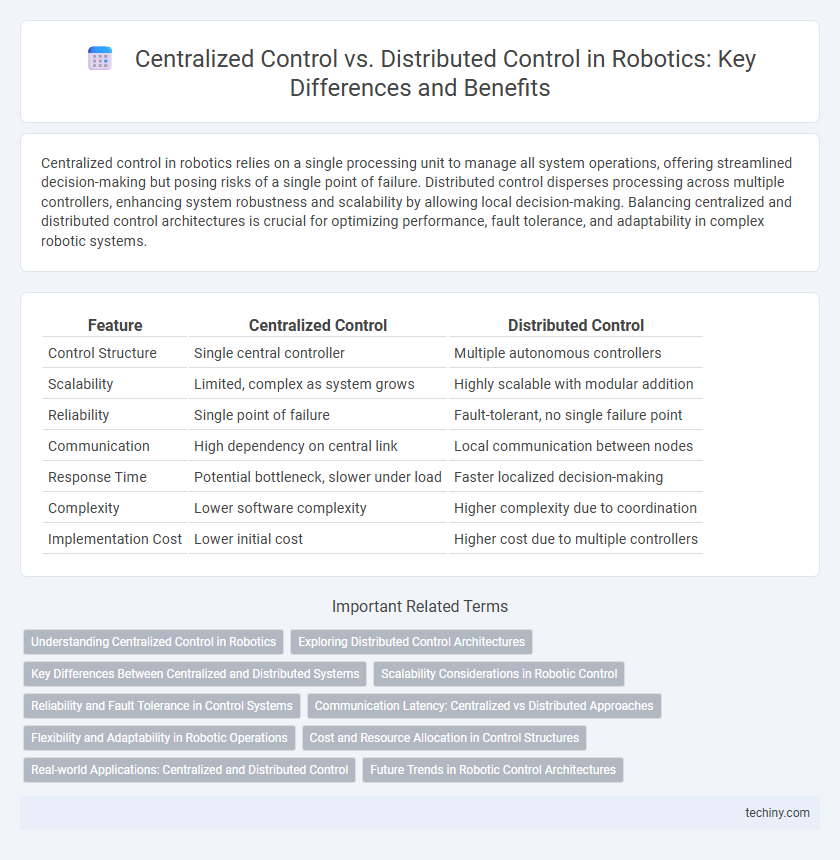
| Feature | Centralized Control | Distributed Control |
|---|---|---|
| Control Structure | Single central controller | Multiple autonomous controllers |
| Scalability | Limited, complex as system grows | Highly scalable with modular addition |
| Reliability | Single point of failure | Fault-tolerant, no single failure point |
| Communication | High dependency on central link | Local communication between nodes |
| Response Time | Potential bottleneck, slower under load | Faster localized decision-making |
| Complexity | Lower software complexity | Higher complexity due to coordination |
| Implementation Cost | Lower initial cost | Higher cost due to multiple controllers |
Understanding Centralized Control in Robotics
Centralized control in robotics involves a single processing unit that manages all decision-making and coordination tasks for the entire robotic system. This approach simplifies system architecture and ensures consistent control but may create bottlenecks and reduce fault tolerance compared to distributed systems. Centralized control is typically favored in applications requiring tight synchronization and precise timing, such as industrial automation and robotic arms.
Exploring Distributed Control Architectures
Distributed control architectures in robotics enhance system scalability and fault tolerance by decentralizing decision-making processes across multiple robotic agents or subsystems. These architectures improve real-time responsiveness and robustness by enabling individual components to operate independently while maintaining coordinated actions through communication protocols. Advances in distributed algorithms, multi-agent systems, and sensor networks drive the development of more adaptive and resilient robotic platforms compared to traditional centralized control models.
Key Differences Between Centralized and Distributed Systems
Centralized control in robotics relies on a single processing unit that manages all decision-making and coordination, enabling streamlined communication but creating a potential bottleneck and single point of failure. Distributed control systems allocate decision-making across multiple processors or nodes, enhancing scalability, fault tolerance, and real-time responsiveness. Key differences include system complexity, with centralized systems being simpler to implement but less resilient, while distributed systems require sophisticated coordination algorithms yet offer improved robustness and flexibility in dynamic environments.
Scalability Considerations in Robotic Control
Centralized control systems in robotics often face scalability challenges as the number of robots increases, leading to potential bottlenecks in processing and communication. Distributed control architectures enhance scalability by enabling individual robots to process data locally and coordinate tasks autonomously, reducing the dependency on a central unit. This decentralized approach facilitates easier integration of additional robots, improving overall system robustness and flexibility in complex environments.
Reliability and Fault Tolerance in Control Systems
Centralized control systems in robotics offer streamlined decision-making but pose risks of single points of failure, reducing overall system reliability. Distributed control architectures enhance fault tolerance by enabling multiple controllers to manage tasks independently, ensuring continued operation despite individual unit failures. Redundant communication and real-time synchronization in distributed systems further increase robustness and resilience in complex robotic applications.
Communication Latency: Centralized vs Distributed Approaches
Communication latency in centralized control systems often leads to bottlenecks as all sensor data and commands must pass through a central processor, increasing delay and reducing real-time responsiveness. Distributed control architectures mitigate this issue by processing data locally at multiple nodes, enabling faster decision-making and reducing the risks associated with single points of failure. Optimizing communication protocols and network topology in distributed systems further minimizes latency, enhancing overall robotic system performance.
Flexibility and Adaptability in Robotic Operations
Distributed control systems in robotics offer superior flexibility and adaptability by enabling individual components to operate autonomously and communicate locally, enhancing real-time decision-making and fault tolerance. Centralized control systems, while simpler to manage and coordinate, often face limitations in scaling and adapting quickly to dynamic or complex environments due to a single point of control. Robotics applications benefit from distributed architectures when missions demand rapid reconfiguration and resilience, supporting diverse operational conditions and modular upgrades.
Cost and Resource Allocation in Control Structures
Centralized control in robotics often incurs higher costs due to the need for a powerful central processor and complex communication infrastructure, yet it simplifies resource management by consolidating data processing in one location. Distributed control allocates processing tasks across multiple nodes, reducing individual unit costs and enabling scalable resource allocation, though it may introduce complexity in coordination and synchronization. Efficient resource allocation in distributed systems enhances fault tolerance and flexibility, making it suitable for large-scale or modular robotic applications.
Real-world Applications: Centralized and Distributed Control
Centralized control systems in robotics are commonly used in industrial automation where precise coordination and simplified management of robotic arms are crucial, such as in automotive manufacturing lines. Distributed control systems are prevalent in autonomous robot swarms and multi-agent delivery drones, enabling real-time decision-making and fault tolerance through decentralized communication. These control architectures optimize efficiency and reliability by tailoring control strategies to the complexity and scale of robotic tasks in real-world applications.
Future Trends in Robotic Control Architectures
Future trends in robotic control architectures emphasize increased adoption of distributed control systems due to their enhanced scalability, fault tolerance, and real-time responsiveness. Advances in edge computing and AI integration enable decentralized decision-making, reducing latency and improving adaptability in complex robotic networks. Emerging hybrid architectures combine centralized oversight with distributed autonomy to optimize performance across diverse robotic applications.
Centralized control vs Distributed control Infographic