Teach pendant programming allows operators to directly control robots on the factory floor, enabling real-time adjustments and immediate feedback. Off-line programming facilitates complex task creation in a virtual environment, reducing downtime by simulating and optimizing robot paths before deployment. Combining both approaches enhances operational efficiency, balancing hands-on precision with advanced planning capabilities.
Table of Comparison
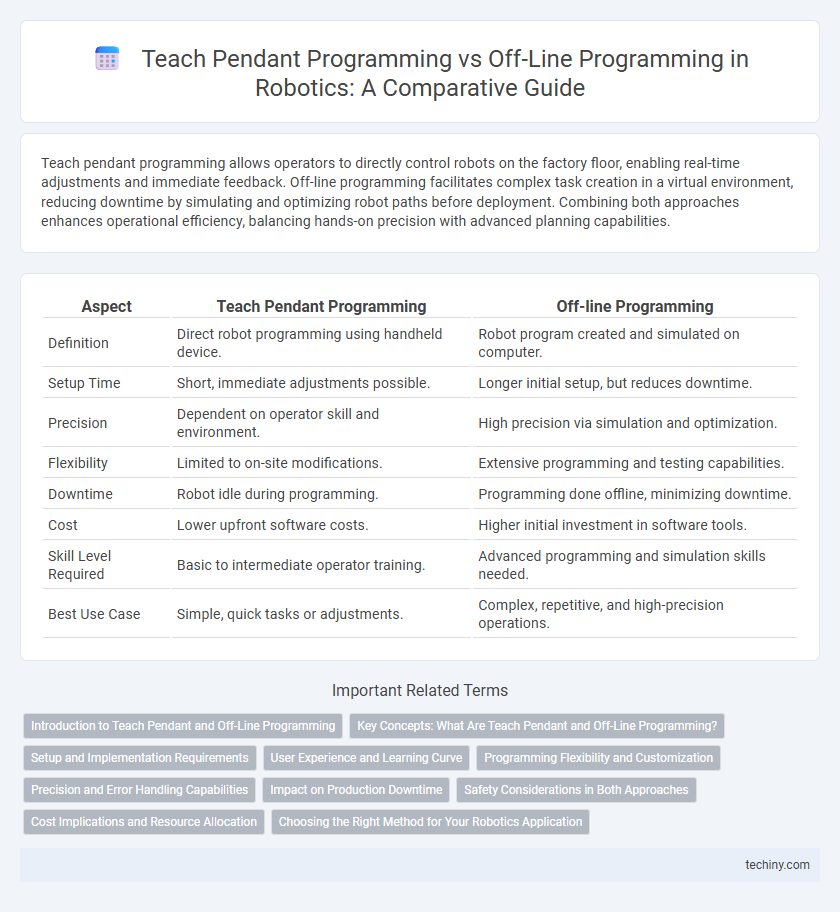
| Aspect | Teach Pendant Programming | Off-line Programming |
|---|---|---|
| Definition | Direct robot programming using handheld device. | Robot program created and simulated on computer. |
| Setup Time | Short, immediate adjustments possible. | Longer initial setup, but reduces downtime. |
| Precision | Dependent on operator skill and environment. | High precision via simulation and optimization. |
| Flexibility | Limited to on-site modifications. | Extensive programming and testing capabilities. |
| Downtime | Robot idle during programming. | Programming done offline, minimizing downtime. |
| Cost | Lower upfront software costs. | Higher initial investment in software tools. |
| Skill Level Required | Basic to intermediate operator training. | Advanced programming and simulation skills needed. |
| Best Use Case | Simple, quick tasks or adjustments. | Complex, repetitive, and high-precision operations. |
Introduction to Teach Pendant and Off-Line Programming
Teach pendant programming involves direct, real-time control of robots through a handheld device, enabling operators to guide robots by inputting commands and movements on-site. Off-line programming uses computer software to create and simulate robot programs in a virtual environment, allowing for testing and optimization without interrupting production. This method enhances flexibility and reduces downtime by enabling programmers to develop complex tasks away from the robotic system.
Key Concepts: What Are Teach Pendant and Off-Line Programming?
Teach pendant programming involves manually guiding a robot using a handheld device to record precise movements in real-time, offering intuitive control and immediate feedback during task setup. Off-line programming utilizes specialized software to create and simulate robot programs in a virtual environment, enabling complex path planning and optimization without halting production. Both methods are essential in robotics for balancing flexibility, efficiency, and minimizing downtime in automated processes.
Setup and Implementation Requirements
Teach pendant programming requires direct interaction with the robot, using a handheld device to manually input commands, which simplifies initial setup but demands robot downtime during programming. Off-line programming involves creating and simulating robot programs in a virtual environment using specialized software, allowing for advanced planning and testing without interrupting production. Implementation of off-line programming necessitates accurate digital models of the robot and its workspace, along with integration tools to transfer programs seamlessly to the robot controller.
User Experience and Learning Curve
Teach pendant programming offers a hands-on, intuitive user experience ideal for operators with limited programming skills, providing immediate feedback through direct robot interaction. Off-line programming requires specialized software knowledge and a steeper learning curve but enables complex, precise path planning and simulation without halting production. User proficiency typically improves faster with teach pendants, while off-line programming better suits advanced users aiming for efficiency and scalability.
Programming Flexibility and Customization
Teach pendant programming offers real-time control and immediate feedback, making it ideal for on-the-spot adjustments and simple task customization. Off-line programming provides greater flexibility by enabling complex simulation, optimization, and detailed task customization without halting production. This approach enhances productivity through precise control over robot paths and parameters, adapting seamlessly to varied and dynamic industrial applications.
Precision and Error Handling Capabilities
Teach pendant programming offers real-time precision adjustments by allowing operators to manually guide robots through exact motions, enhancing immediate error handling during tasks. Off-line programming relies on virtual simulations, which can improve overall task accuracy through pre-validated paths but may struggle with unforeseen real-world variances. Combining both approaches can optimize precision and robustness by leveraging simulation accuracy and on-the-fly correction capabilities.
Impact on Production Downtime
Teach pendant programming requires stopping the robot for manual input and real-time adjustments, directly increasing production downtime. Off-line programming allows robotic code to be developed and tested virtually, significantly reducing the need for physical interruptions. Implementing off-line programming can minimize downtime by up to 70%, enhancing overall manufacturing efficiency.
Safety Considerations in Both Approaches
Teach pendant programming requires operators to be in close proximity to the robot, increasing the risk of accidental contact and injury, which necessitates strict adherence to safety protocols and use of emergency stop functions. Off-line programming allows for the creation and simulation of robot tasks in a virtual environment, significantly reducing the risk of physical hazards by minimizing human-robot interaction during the programming phase. Implementing comprehensive safety measures such as collision detection systems and restricted work zones is crucial in both approaches to ensure operator protection and operational safety.
Cost Implications and Resource Allocation
Teach pendant programming requires direct human interaction on the production floor, which increases labor costs and limits operational efficiency due to machine downtime. Off-line programming enables code development in a virtual environment, minimizing production halts and optimizing resource allocation by allowing simultaneous task management. Cost implications favor off-line programming as it reduces the need for skilled operator presence during programming and accelerates deployment times.
Choosing the Right Method for Your Robotics Application
Teach pendant programming offers real-time control and intuitive interaction, ideal for simple, low-volume tasks or on-site adjustments in robotics applications. Off-line programming enables simulation, optimization, and complex task planning in a virtual environment, increasing efficiency for high-volume production and minimizing downtime. Selecting between these methods depends on the specific application requirements, including production scale, task complexity, and desired flexibility in robot operation.
Teach pendant programming vs Off-line programming Infographic