Proximity sensors detect the presence or distance of objects without physical contact, making them ideal for obstacle avoidance and spatial awareness in robotics. Tactile sensors, on the other hand, require direct contact to measure pressure, texture, or force, which enhances a robot's ability to manipulate objects with precision. Combining both sensors improves a robot's interaction with its environment by providing complementary data on both contact and near-field detection.
Table of Comparison
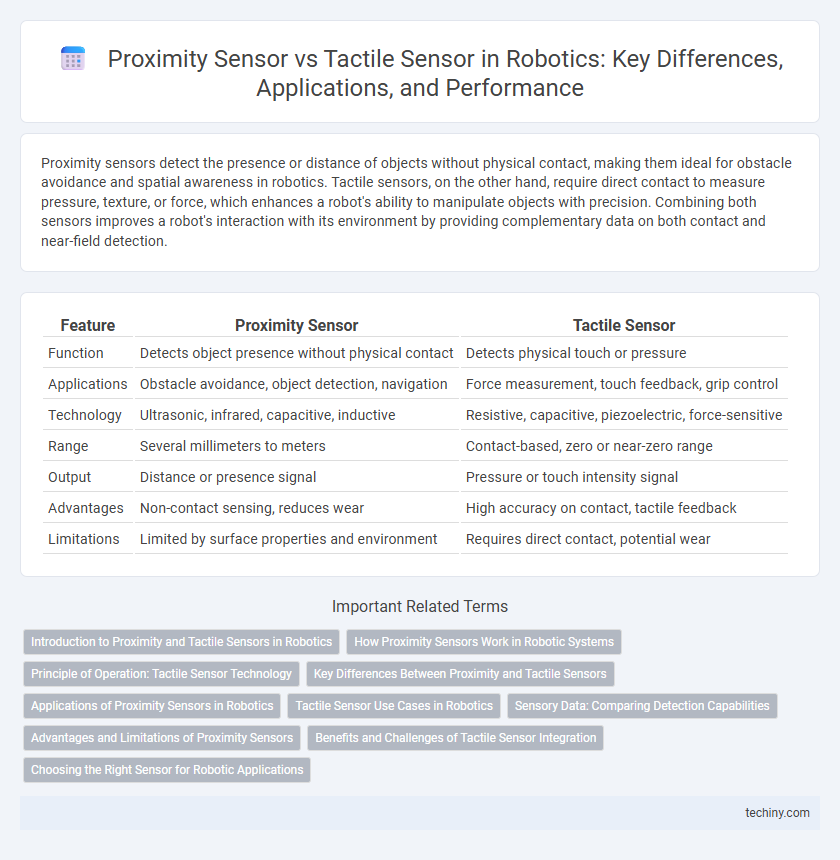
| Feature | Proximity Sensor | Tactile Sensor |
|---|---|---|
| Function | Detects object presence without physical contact | Detects physical touch or pressure |
| Applications | Obstacle avoidance, object detection, navigation | Force measurement, touch feedback, grip control |
| Technology | Ultrasonic, infrared, capacitive, inductive | Resistive, capacitive, piezoelectric, force-sensitive |
| Range | Several millimeters to meters | Contact-based, zero or near-zero range |
| Output | Distance or presence signal | Pressure or touch intensity signal |
| Advantages | Non-contact sensing, reduces wear | High accuracy on contact, tactile feedback |
| Limitations | Limited by surface properties and environment | Requires direct contact, potential wear |
Introduction to Proximity and Tactile Sensors in Robotics
Proximity sensors in robotics detect the presence or distance of objects without physical contact, using technologies such as infrared, ultrasonic, or capacitive sensing. Tactile sensors provide robots with the ability to perceive touch, pressure, or texture through physical contact, enabling precise manipulation and interaction with the environment. Both sensor types enhance robotic perception by offering complementary data critical for navigation, object handling, and safety in automated systems.
How Proximity Sensors Work in Robotic Systems
Proximity sensors in robotic systems detect the presence or absence of objects without physical contact by emitting electromagnetic fields or light waves and measuring changes in the returned signal. Common types include inductive, capacitive, ultrasonic, and infrared sensors, each suited for detecting different materials and distances. These sensors enable robots to perform precise object detection, navigation, and collision avoidance tasks in manufacturing, automation, and service applications.
Principle of Operation: Tactile Sensor Technology
Tactile sensor technology operates by detecting physical contact or pressure through resistive, capacitive, piezoelectric, or optical sensing principles, converting mechanical stimuli into electrical signals for robotic applications. Unlike proximity sensors that sense the presence of objects without contact, tactile sensors provide detailed information about texture, force, and shape by measuring deformation or strain on their surface. This capability enables robots to perform delicate manipulation tasks, enhancing precision in environments requiring fine touch feedback.
Key Differences Between Proximity and Tactile Sensors
Proximity sensors detect objects without physical contact by emitting electromagnetic fields or light beams, making them ideal for applications requiring non-contact object detection. Tactile sensors require direct physical contact to measure force, pressure, or touch, providing precise feedback for robotic manipulation and haptics. Key differences lie in their operational principles, with proximity sensors enabling object presence detection from a distance, while tactile sensors gather detailed touch information for interaction and control.
Applications of Proximity Sensors in Robotics
Proximity sensors in robotics are widely used for object detection, collision avoidance, and automated navigation, enabling robots to operate safely in dynamic environments. These sensors detect nearby objects without physical contact, making them ideal for tasks such as pick-and-place operations, mobile robot obstacle avoidance, and automated assembly lines. In contrast to tactile sensors that require direct contact, proximity sensors enhance robotic efficiency by providing early warnings and spatial awareness through infrared, ultrasonic, or capacitive sensing technologies.
Tactile Sensor Use Cases in Robotics
Tactile sensors in robotics are essential for precise manipulation tasks, enabling robots to detect pressure, texture, and vibration when interacting with objects. Common use cases include robotic grippers for delicate assembly, human-robot interaction for safety and responsiveness, and prosthetic limbs providing sensory feedback to users. These sensors enhance robots' ability to perform complex tasks in manufacturing, healthcare, and service industries where touch sensitivity is crucial.
Sensory Data: Comparing Detection Capabilities
Proximity sensors detect objects without physical contact using electromagnetic fields or light, providing data on presence and distance with high sensitivity to environmental conditions. Tactile sensors require direct physical contact, offering precise pressure, texture, and force measurements critical for tasks needing delicate manipulation. Combining both sensors enhances robotic perception by integrating non-contact spatial awareness and detailed touch feedback for improved interaction accuracy.
Advantages and Limitations of Proximity Sensors
Proximity sensors offer non-contact detection capabilities that enhance robot safety and longevity by reducing mechanical wear and tear. They excel in detecting objects regardless of material type, surface condition, or environmental factors such as dust or moisture. However, limitations include sensitivity to electromagnetic interference and reduced accuracy in distinguishing closely spaced objects compared to tactile sensors.
Benefits and Challenges of Tactile Sensor Integration
Tactile sensor integration in robotics enhances object manipulation by providing precise touch feedback and improving interaction with unstructured environments. Key benefits include increased sensitivity to pressure, texture, and force, enabling delicate and adaptive handling of objects. Challenges involve sensor durability, signal interference, and complex data processing required for real-time responsiveness and accurate interpretation.
Choosing the Right Sensor for Robotic Applications
Proximity sensors detect objects without physical contact using electromagnetic fields or light, ideal for non-intrusive obstacle detection and positioning in robotics. Tactile sensors require direct contact to measure pressure, texture, or force, making them essential for applications involving touch, grip, or manipulation. Selecting the right sensor depends on the task's need for contact sensitivity versus non-contact detection to optimize robotic performance and safety.
Proximity sensor vs Tactile sensor Infographic