A gripper is a specific type of end effector designed primarily for grasping and holding objects with mechanical fingers or claws. End effectors encompass a broader range of tools attached to a robot's arm, including grippers, welding torches, and sensors, tailored for various tasks in automation. Selecting the appropriate end effector depends on the application requirements, such as precision, payload, and the nature of the objects being manipulated.
Table of Comparison
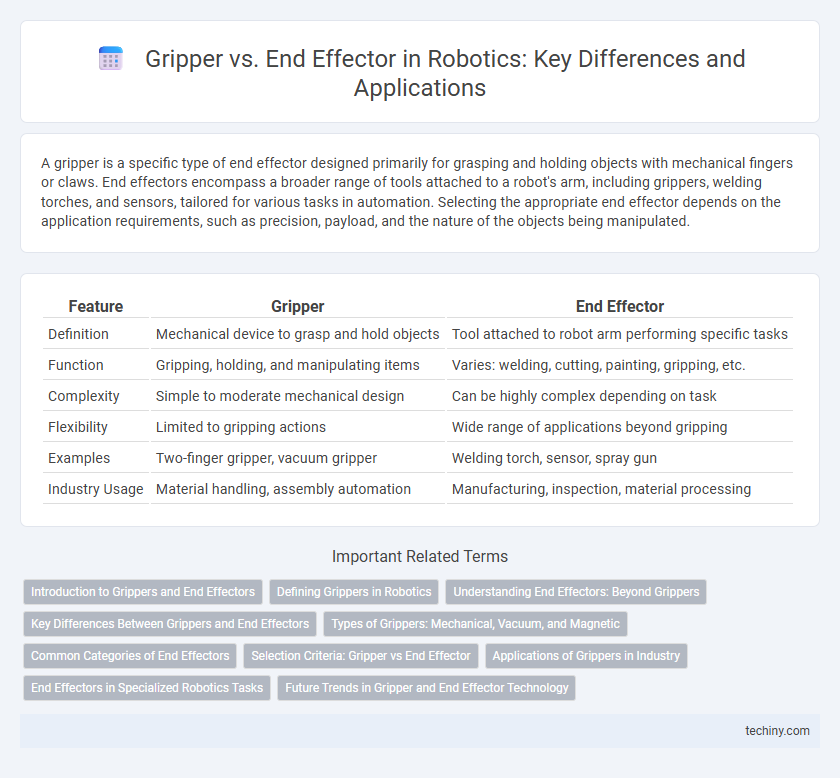
| Feature | Gripper | End Effector |
|---|---|---|
| Definition | Mechanical device to grasp and hold objects | Tool attached to robot arm performing specific tasks |
| Function | Gripping, holding, and manipulating items | Varies: welding, cutting, painting, gripping, etc. |
| Complexity | Simple to moderate mechanical design | Can be highly complex depending on task |
| Flexibility | Limited to gripping actions | Wide range of applications beyond gripping |
| Examples | Two-finger gripper, vacuum gripper | Welding torch, sensor, spray gun |
| Industry Usage | Material handling, assembly automation | Manufacturing, inspection, material processing |
Introduction to Grippers and End Effectors
Grippers and end effectors serve as critical components in robotic systems, enabling interaction with objects in various industrial and service applications. Grippers, typically designed for grasping, holding, or manipulating items, come in mechanical, pneumatic, and vacuum types, each optimized for specific tasks like assembly or packaging. End effectors extend beyond gripping functions, incorporating specialized tools such as welding torches, sensors, or screwdrivers to perform diverse operations requiring precise control and adaptability.
Defining Grippers in Robotics
Grippers in robotics are specialized end effectors designed to grasp, hold, and manipulate objects with precision and stability, often using mechanical fingers, suction, or magnetic forces. Unlike general end effectors, grippers focus primarily on gripping tasks, enabling robots to perform pick-and-place, assembly, and material handling operations efficiently. The choice of gripper type depends on the object's size, shape, weight, and required dexterity, making them essential components in automation and manufacturing industries.
Understanding End Effectors: Beyond Grippers
End effectors in robotics encompass a diverse range of tools designed for specific tasks, extending far beyond traditional grippers that primarily focus on gripping and holding objects. Versatile end effectors include welding torches, vacuum cups, and specialized cutters, enabling robots to perform complex operations such as assembly, painting, packaging, and precision manipulation. Understanding the functionalities and applications of various end effectors is crucial for optimizing robotic system performance and enhancing automation capabilities across industries.
Key Differences Between Grippers and End Effectors
Grippers are a specific type of end effector designed primarily for grasping and holding objects with mechanical fingers or claws. End effectors encompass a broader category including grippers, suction cups, welding torches, and sensors, each tailored to perform distinct tasks in robotic applications. The key difference lies in functionality: grippers focus on secure object manipulation, while end effectors enable diverse interactions beyond gripping, such as cutting, welding, or sensing.
Types of Grippers: Mechanical, Vacuum, and Magnetic
Mechanical grippers use fingers or jaws to grasp objects with precision and are ideal for handling rigid materials. Vacuum grippers create suction to lift flat or smooth surfaces, commonly utilized in packaging and electronics industries. Magnetic grippers employ magnetic fields to manipulate ferromagnetic items, offering non-contact handling for metal parts in manufacturing.
Common Categories of End Effectors
Common categories of end effectors in robotics include grippers, which are designed to grasp, hold, and manipulate objects, and tool changers that allow for swift exchange of various tools. Vacuum cups use suction to handle fragile or smooth surfaces, while magnetic grippers enable handling of ferrous materials without physical contact. Specialized end effectors such as welding torches, paint sprayers, and sensors enhance the functionality of robotic arms for industrial automation.
Selection Criteria: Gripper vs End Effector
Selection criteria for grippers versus end effectors in robotics depend on the specific application requirements such as payload capacity, precision, and object geometry. Grippers are ideal for tasks needing straightforward gripping action with moderate dexterity, whereas end effectors offer advanced functionality, including tool integration and complex manipulation. Material compatibility, environmental conditions, and control system integration also play critical roles in choosing between gripper types and multifunctional end effectors.
Applications of Grippers in Industry
Grippers serve as essential components in robotic systems by enabling precise handling, manipulation, and assembly of diverse industrial materials such as electronic components, automotive parts, and food products. Their adaptability to various shapes and sizes makes them ideal for automation tasks including pick-and-place operations, packaging, and sorting across manufacturing sectors. Integration of advanced sensors and smart materials enhances grippers' performance, improving accuracy and efficiency in complex industrial environments.
End Effectors in Specialized Robotics Tasks
End effectors in specialized robotics tasks are designed to perform precise functions such as welding, painting, or medical surgeries, enhancing a robot's versatility beyond simple gripping. These components can include tools like sensors, cutters, or suction devices, tailored to specific industrial or clinical requirements. Optimizing end effectors improves efficiency, accuracy, and adaptability in complex robotic applications.
Future Trends in Gripper and End Effector Technology
Future trends in gripper and end effector technology emphasize the integration of advanced sensors and AI for enhanced precision and adaptability in robotic manipulation. Soft robotics and bio-inspired designs are driving innovations that improve dexterity and safety when handling delicate objects. The development of modular and customizable end effectors enables more versatile applications across diverse industries, from manufacturing to healthcare.
gripper vs end effector Infographic