Compliance in robotics allows machines to adapt to external forces and uncertainties, enabling safer interaction with humans and unpredictable environments. Stiffness provides precise control and stability, essential for tasks requiring accuracy and rigidity, such as assembly or machining. Balancing compliance and stiffness is crucial for optimizing robot performance and versatility across various applications.
Table of Comparison
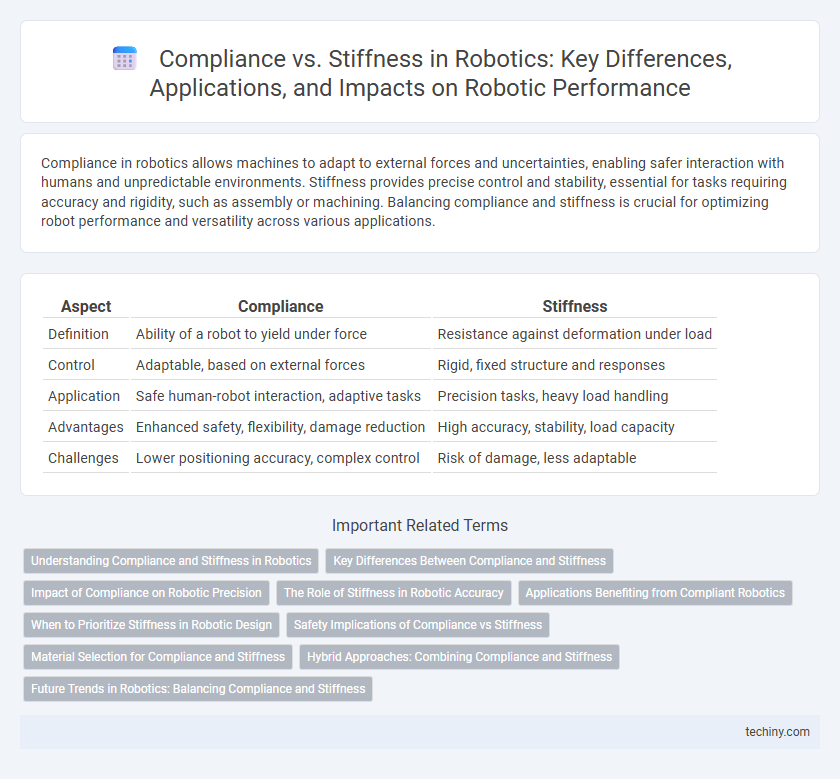
| Aspect | Compliance | Stiffness |
|---|---|---|
| Definition | Ability of a robot to yield under force | Resistance against deformation under load |
| Control | Adaptable, based on external forces | Rigid, fixed structure and responses |
| Application | Safe human-robot interaction, adaptive tasks | Precision tasks, heavy load handling |
| Advantages | Enhanced safety, flexibility, damage reduction | High accuracy, stability, load capacity |
| Challenges | Lower positioning accuracy, complex control | Risk of damage, less adaptable |
Understanding Compliance and Stiffness in Robotics
Compliance in robotics refers to a robot's ability to yield under external force, enhancing safety and adaptability in dynamic environments by absorbing shocks and reducing damage risk. Stiffness denotes the robot's resistance to deformation, crucial for precision tasks requiring stable and accurate positioning. Balancing compliance and stiffness enables robots to perform delicate manipulations while maintaining control and robustness in industrial and service applications.
Key Differences Between Compliance and Stiffness
Compliance in robotics refers to the ability of a robot or its components to yield or deform under force, allowing for adaptive interaction with the environment. Stiffness represents the resistance of a robotic structure or joint to deformation, maintaining precise positioning and stability during tasks. The key difference lies in compliance enhancing flexibility and safety through controlled flexibility, while stiffness ensures accuracy and load-bearing capacity by minimizing movement under applied forces.
Impact of Compliance on Robotic Precision
Compliance in robotics enhances adaptability by allowing controlled flexibility in joints and materials, reducing the risk of damage during unexpected collisions. However, increased compliance often leads to diminished positional accuracy and precision due to elastic deformations under load. Balancing compliance and stiffness is crucial for optimizing robotic performance in tasks requiring both safety and high-precision manipulation.
The Role of Stiffness in Robotic Accuracy
Stiffness in robotics directly impacts positional accuracy by minimizing deflection and deformation under load, ensuring precise task execution. High stiffness in robotic joints and structures reduces mechanical compliance, which is critical for applications requiring exact positioning and repeatability. Optimizing stiffness levels enhances the robot's ability to maintain trajectory accuracy and improves overall system reliability in dynamic environments.
Applications Benefiting from Compliant Robotics
Compliant robotics enable safer human-robot interaction and improved adaptability in uncertain environments, making them ideal for applications in medical surgery, collaborative manufacturing, and assistive devices. Their inherent flexibility absorbs impacts and accommodates variable forces, enhancing precision in delicate manipulation tasks. Industries leveraging compliant robotics benefit from reduced injury risk, increased operational efficiency, and enhanced fault tolerance.
When to Prioritize Stiffness in Robotic Design
Prioritizing stiffness in robotic design is essential when precision and repeatability in tasks such as machining, assembly, or high-speed pick-and-place operations are critical. High stiffness reduces deflection and vibration, enhancing accuracy and control in robotic arms and end-effectors. Designs requiring minimal positional errors and stability under dynamic loads benefit significantly from increased structural rigidity.
Safety Implications of Compliance vs Stiffness
Compliance in robotics enhances safety by allowing robots to absorb unexpected forces and reduce impact on humans during interactions, preventing injuries. High stiffness robots, while precise, pose greater risks due to their rigid responses to collisions, increasing the potential harm from accidental contacts. Safety-critical applications benefit from integrating compliant mechanisms or control strategies that balance force adaptability with operational precision to mitigate hazards in human-robot collaboration.
Material Selection for Compliance and Stiffness
Material selection plays a critical role in balancing compliance and stiffness in robotic systems, with elastomers and polymers favored for compliance due to their flexibility and energy absorption capabilities. Metals and composites are preferred for stiffness, offering high strength-to-weight ratios and structural integrity essential for precision and load-bearing tasks. Advanced materials like shape memory alloys and smart composites enable adaptive compliance, allowing robots to switch between rigid and flexible states based on task requirements.
Hybrid Approaches: Combining Compliance and Stiffness
Hybrid approaches in robotics integrate compliance and stiffness to optimize performance across diverse tasks, enabling robots to adapt their interaction forces dynamically while maintaining precise control. These methods leverage variable impedance control and series elastic actuators to balance flexibility with accuracy, enhancing safety and efficiency in human-robot collaboration. Combining compliant elements with stiff structural components allows robotic systems to achieve both energy absorption during impacts and high positional stability, crucial for versatile industrial applications.
Future Trends in Robotics: Balancing Compliance and Stiffness
Future trends in robotics emphasize adaptive control systems that dynamically balance compliance and stiffness to enhance safety and precision in human-robot interaction. Advanced materials like soft robotics components enable robots to adjust stiffness levels in real-time, improving performance in diverse environments. Integration of AI-driven sensors further refines this balance, allowing robots to respond flexibly to unpredictable forces while maintaining structural integrity.
Compliance vs Stiffness Infographic