Remote robots operate independently from human operators, controlled via wireless communication to perform tasks in hazardous or inaccessible environments, enhancing safety and efficiency. Collaborative robots, or cobots, work alongside humans in shared spaces, designed with advanced sensors and safety features to adapt to human movements and ensure seamless interaction. While remote robots prioritize distance and autonomy, collaborative robots emphasize direct human-robot cooperation to optimize productivity in dynamic settings.
Table of Comparison
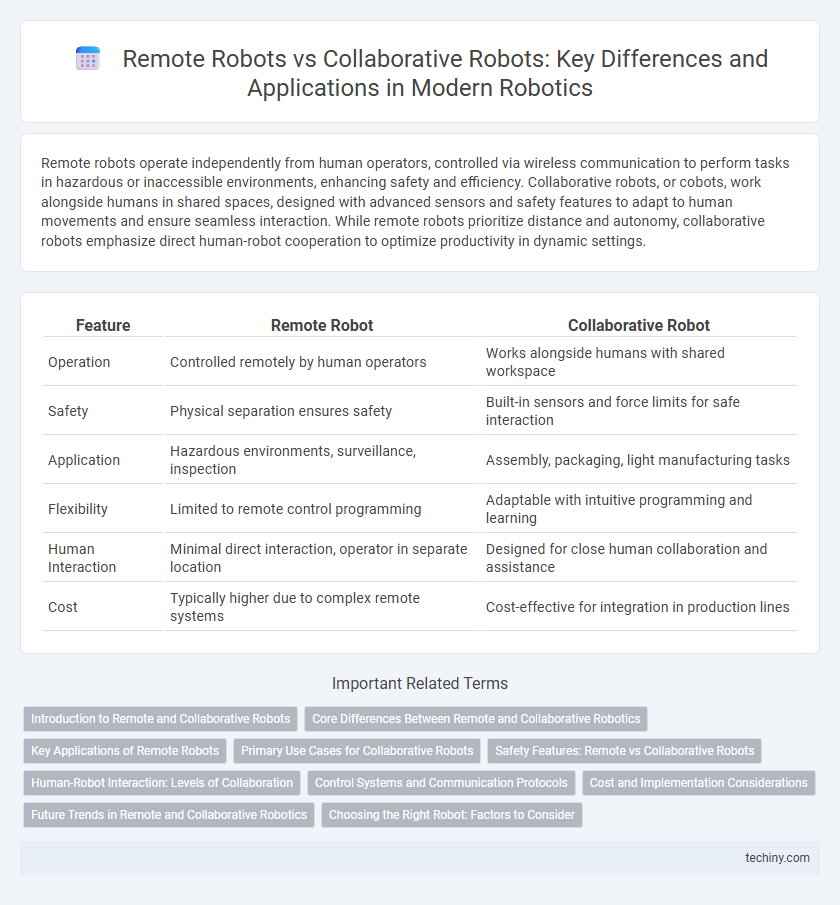
| Feature | Remote Robot | Collaborative Robot |
|---|---|---|
| Operation | Controlled remotely by human operators | Works alongside humans with shared workspace |
| Safety | Physical separation ensures safety | Built-in sensors and force limits for safe interaction |
| Application | Hazardous environments, surveillance, inspection | Assembly, packaging, light manufacturing tasks |
| Flexibility | Limited to remote control programming | Adaptable with intuitive programming and learning |
| Human Interaction | Minimal direct interaction, operator in separate location | Designed for close human collaboration and assistance |
| Cost | Typically higher due to complex remote systems | Cost-effective for integration in production lines |
Introduction to Remote and Collaborative Robots
Remote robots operate in hazardous or inaccessible environments, controlled remotely by human operators through wireless or wired communication systems, enhancing safety and precision in industries like mining and space exploration. Collaborative robots, or cobots, are designed to work alongside humans in shared workspaces, equipped with advanced sensors and safety features to ensure seamless human-robot interaction in manufacturing and assembly lines. The integration of remote and collaborative robots drives innovation by combining remote autonomy with close human collaboration, optimizing operational efficiency and workplace safety.
Core Differences Between Remote and Collaborative Robotics
Remote robots operate in environments isolated from human presence, controlled via teleoperation or pre-programmed commands to perform tasks in hazardous or inaccessible locations. Collaborative robots, or cobots, are designed to work alongside humans in shared workspaces, equipped with advanced sensors and safety features to ensure direct interaction without protective barriers. The core differences lie in their operational settings, interaction modalities, and safety protocols, with remote robots prioritizing distance and autonomy, while cobots emphasize ergonomic collaboration and real-time human-robot cooperation.
Key Applications of Remote Robots
Remote robots excel in hazardous environments such as deep-sea exploration, nuclear facility inspections, and space missions, where direct human intervention is impossible or dangerous. These robots perform critical tasks like underwater pipeline maintenance, disaster site assessment, and satellite servicing with high precision and reliability. Their ability to operate in extreme conditions while transmitting real-time data significantly enhances remote monitoring and control capabilities.
Primary Use Cases for Collaborative Robots
Collaborative robots (cobots) primarily excel in tasks requiring close human-robot interaction, such as assembly, quality inspection, and packaging in manufacturing environments. Unlike remote robots designed for hazardous or hard-to-reach locations, cobots enhance productivity by working alongside operators on repetitive or precision-driven jobs. Their safety features and adaptability make them ideal for small and medium enterprises aiming to automate intricate processes without extensive safety barriers.
Safety Features: Remote vs Collaborative Robots
Remote robots prioritize safety through physical separation, minimizing human exposure to hazards by operating in isolated environments with no direct contact. Collaborative robots (cobots) incorporate advanced sensors, force limiters, and real-time monitoring to detect human presence and prevent collisions, enabling safe interaction within shared workspaces. These intrinsic safety features enable cobots to work alongside humans without compromising operational safety, enhancing efficiency in dynamic environments.
Human-Robot Interaction: Levels of Collaboration
Remote robots operate with minimal human presence, relying on operators controlling machines from a distance, which limits spontaneous interaction and real-time adaptability. Collaborative robots (cobots) are designed for direct, shared workspace collaboration, enabling intuitive human-robot interaction through sensors and adaptive algorithms that ensure safety and efficiency. The level of collaboration in cobots supports tasks requiring close coordination, enhancing productivity and reducing physical strain on human workers.
Control Systems and Communication Protocols
Remote robots utilize teleoperated control systems with real-time feedback loops, relying on high-bandwidth communication protocols such as Ethernet or Wi-Fi for delayed human input processing. Collaborative robots (cobots) integrate advanced control algorithms including impedance and force control, employing low-latency, deterministic communication protocols like EtherCAT or PROFINET for seamless human-robot interaction. The distinct control systems emphasize remote precision versus adaptive cooperative tasks, while communication protocols prioritize latency and reliability accordingly.
Cost and Implementation Considerations
Remote robots typically require higher initial investment due to specialized communication systems and safety protocols, increasing implementation complexity and costs. Collaborative robots (cobots) offer lower upfront expenses with simpler integration into existing workflows, leveraging user-friendly programming and safety features that reduce the need for extensive guarding. Cost efficiency and streamlined deployment make cobots favorable for small to medium enterprises compared to the often resource-intensive setup of remote robotic systems.
Future Trends in Remote and Collaborative Robotics
Future trends in remote and collaborative robotics emphasize enhanced AI integration, enabling robots to perform complex tasks with greater autonomy and precision. Advances in connectivity, such as 5G and edge computing, facilitate real-time control and seamless human-robot interaction across diverse industrial environments. Safety protocols and adaptive learning algorithms continue to evolve, promoting more intuitive collaboration between humans and robots while expanding applications in sectors like healthcare, manufacturing, and logistics.
Choosing the Right Robot: Factors to Consider
Selecting between remote robots and collaborative robots depends on application requirements such as safety, task complexity, and human-robot interaction levels. Remote robots excel in hazardous environments and isolated tasks requiring minimal human presence, while collaborative robots are optimized for close human interaction, versatility, and ease of programming. Key factors include operational environment, required autonomy, payload capacity, and integration with existing systems to ensure optimal performance and workplace safety.
remote robot vs collaborative robot Infographic