Overactuated mechanisms feature more actuators than degrees of freedom, enabling enhanced precision, redundancy, and fault tolerance in robotic movement. Underactuated mechanisms have fewer actuators than degrees of freedom, resulting in simpler, lighter designs with reduced control complexity but limited maneuverability. Choosing between these mechanisms depends on the required balance between control complexity, robustness, and mechanical efficiency in robotic applications.
Table of Comparison
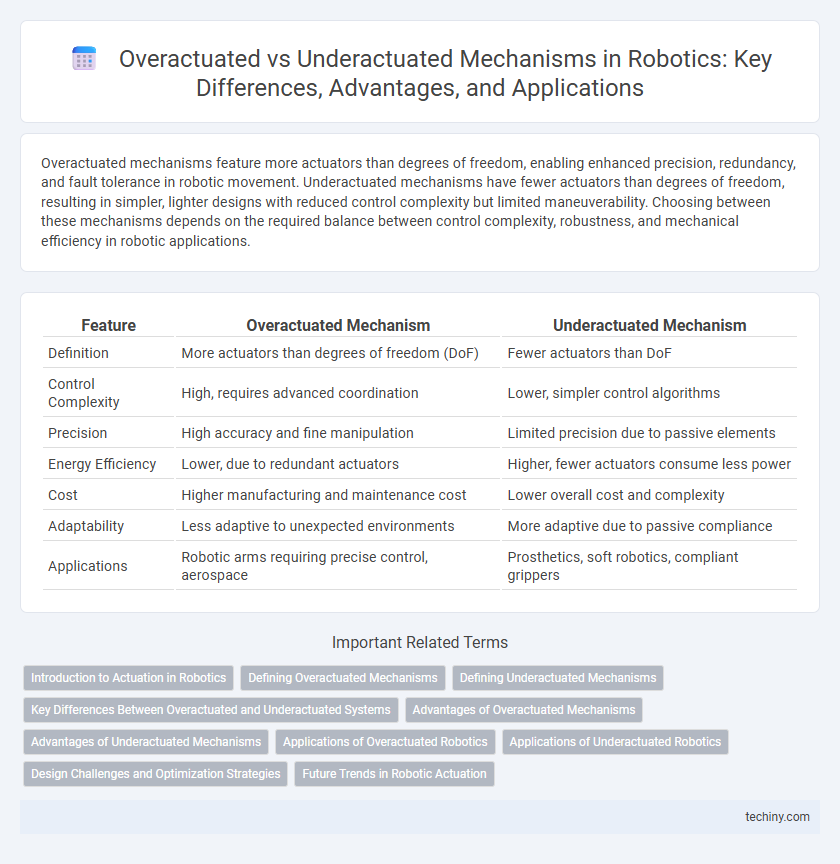
| Feature | Overactuated Mechanism | Underactuated Mechanism |
|---|---|---|
| Definition | More actuators than degrees of freedom (DoF) | Fewer actuators than DoF |
| Control Complexity | High, requires advanced coordination | Lower, simpler control algorithms |
| Precision | High accuracy and fine manipulation | Limited precision due to passive elements |
| Energy Efficiency | Lower, due to redundant actuators | Higher, fewer actuators consume less power |
| Cost | Higher manufacturing and maintenance cost | Lower overall cost and complexity |
| Adaptability | Less adaptive to unexpected environments | More adaptive due to passive compliance |
| Applications | Robotic arms requiring precise control, aerospace | Prosthetics, soft robotics, compliant grippers |
Introduction to Actuation in Robotics
Overactuated mechanisms utilize more actuators than degrees of freedom, enabling enhanced control precision and fault tolerance in robotic systems. Underactuated mechanisms employ fewer actuators than degrees of freedom, relying on passive dynamics and mechanical constraints to achieve movement, which benefits energy efficiency and simplicity. Actuation in robotics fundamentally involves translating control signals into motion, where the choice between overactuation and underactuation impacts complexity, adaptability, and performance.
Defining Overactuated Mechanisms
Overactuated mechanisms in robotics are systems equipped with more actuators than degrees of freedom, enabling enhanced control and redundancy for complex tasks. These mechanisms provide improved fault tolerance and dexterity by distributing loads and compensating for actuator failures. The surplus of actuators allows for optimization of performance parameters such as precision, speed, and energy efficiency in robotic manipulators.
Defining Underactuated Mechanisms
Underactuated mechanisms in robotics feature fewer actuators than degrees of freedom, relying on passive elements like springs and linkages to achieve motion. These systems enhance energy efficiency and reduce weight and cost while maintaining functional adaptability in complex environments. Their design challenges include controlling nonlinear dynamics and ensuring stability despite limited direct control inputs.
Key Differences Between Overactuated and Underactuated Systems
Overactuated mechanisms feature more actuators than degrees of freedom, enabling enhanced control precision and fault tolerance, while underactuated mechanisms have fewer actuators than degrees of freedom, resulting in simpler design and reduced energy consumption. Overactuated systems excel in tasks requiring redundancy and fine manipulation, benefiting from additional actuators to optimize performance and adaptability. Underactuated systems prioritize efficiency and cost-effectiveness, often relying on passive dynamics and control algorithms to manage unactuated degrees of freedom.
Advantages of Overactuated Mechanisms
Overactuated mechanisms in robotics provide enhanced dexterity and fault tolerance due to having more actuators than degrees of freedom, enabling precise control and redundancy. These systems improve reliability by compensating for actuator failures and distribute loads more effectively, increasing the robot's operational lifespan. Overactuation also allows for complex motion patterns and adaptive interactions in dynamic environments, surpassing the capabilities of underactuated robots.
Advantages of Underactuated Mechanisms
Underactuated mechanisms require fewer actuators than degrees of freedom, leading to reduced system complexity, weight, and energy consumption in robotic applications. Their inherent compliance enhances adaptability and robustness when interacting with unstructured environments, improving safety and flexibility. These advantages make underactuated designs ideal for cost-effective, efficient robotic hands and soft robots requiring versatile manipulation capabilities.
Applications of Overactuated Robotics
Overactuated robotic mechanisms, equipped with more actuators than degrees of freedom, enable enhanced precision and redundancy in complex tasks such as aerial drone stabilization and robotic surgical systems. These systems excel in fault tolerance and adaptability, making them ideal for applications requiring high reliability and intricate manipulation. The redundancy in actuation allows for superior control under varying load conditions and environmental uncertainties, critical in aerospace and medical robotics.
Applications of Underactuated Robotics
Underactuated robotic mechanisms are extensively applied in prosthetics, wearable exoskeletons, and gripping devices due to their reduced actuator count and inherent compliance, which enhances adaptability and energy efficiency. These systems leverage passive dynamics and mechanical linkages to perform complex tasks with fewer control inputs, making them ideal for applications requiring lightweight, cost-effective solutions. Their ability to simplify design and control in robotic hands, walking robots, and soft robots expands their use in both industrial automation and human-robot interaction scenarios.
Design Challenges and Optimization Strategies
Overactuated mechanisms in robotics offer increased dexterity and fault tolerance but pose significant design challenges such as complex control algorithms and higher energy consumption. Underactuated mechanisms prioritize simplicity and energy efficiency but require advanced optimization strategies like compliant mechanisms and adaptive control to compensate for limited degrees of freedom. Balancing actuation counts through multi-objective optimization techniques ensures enhanced performance while addressing constraints in weight, cost, and system robustness.
Future Trends in Robotic Actuation
Future trends in robotic actuation emphasize advancements in overactuated mechanisms, which offer enhanced precision and redundancy by incorporating more actuators than degrees of freedom, enabling superior adaptability in complex tasks. Underactuated mechanisms continue to evolve with innovations in compliant materials and control algorithms, prioritizing energy efficiency and simplified design for lightweight, cost-effective robots. Integration of smart sensors and AI-driven control systems will further optimize the performance and responsiveness of both overactuated and underactuated robotic systems in diverse applications such as prosthetics, industrial automation, and autonomous vehicles.
Overactuated mechanism vs Underactuated mechanism Infographic