Open-loop control in robotics operates without feedback, executing preprogrammed commands regardless of changes in the environment, which can lead to inaccuracies in dynamic settings. Closed-loop control continuously monitors sensor data to adjust actions in real-time, ensuring precision and adaptability in robotic movements. This feedback-driven approach enhances performance in complex tasks by correcting errors and compensating for external disturbances.
Table of Comparison
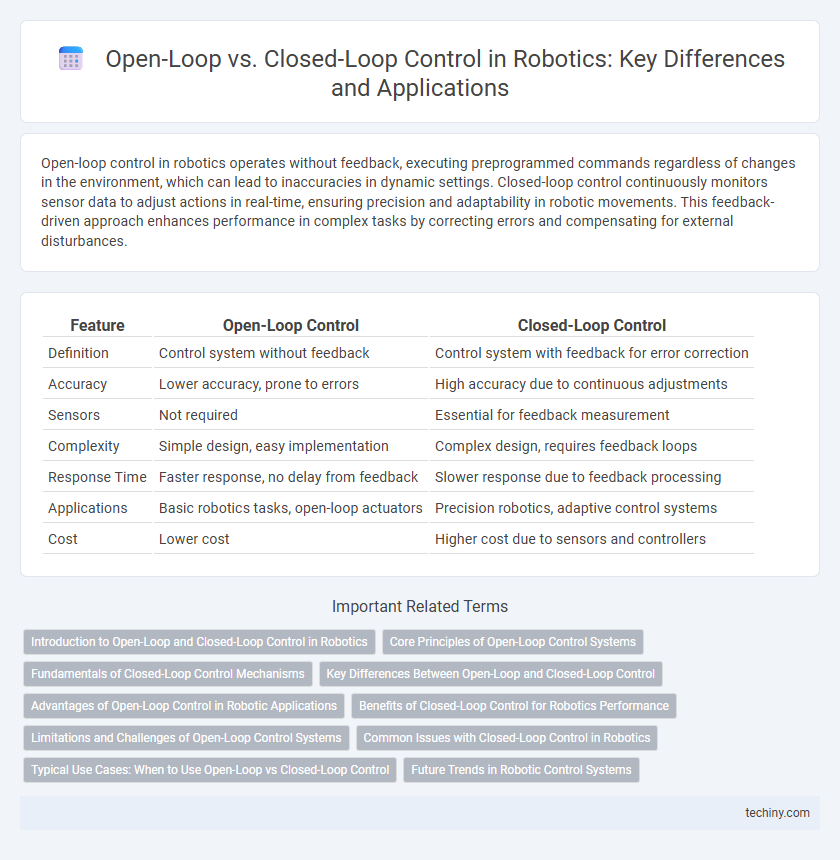
| Feature | Open-Loop Control | Closed-Loop Control |
|---|---|---|
| Definition | Control system without feedback | Control system with feedback for error correction |
| Accuracy | Lower accuracy, prone to errors | High accuracy due to continuous adjustments |
| Sensors | Not required | Essential for feedback measurement |
| Complexity | Simple design, easy implementation | Complex design, requires feedback loops |
| Response Time | Faster response, no delay from feedback | Slower response due to feedback processing |
| Applications | Basic robotics tasks, open-loop actuators | Precision robotics, adaptive control systems |
| Cost | Lower cost | Higher cost due to sensors and controllers |
Introduction to Open-Loop and Closed-Loop Control in Robotics
Open-loop control in robotics operates without feedback, executing pre-programmed commands regardless of the robot's actual performance or environmental changes. Closed-loop control incorporates real-time feedback through sensors to continuously adjust actions, enhancing precision and adaptability in dynamic conditions. Understanding the key distinction between these control systems is essential for designing robotic applications that balance complexity, cost, and operational accuracy.
Core Principles of Open-Loop Control Systems
Open-loop control systems in robotics operate on a fixed sequence of actions without feedback, relying solely on pre-programmed instructions to execute tasks. These systems emphasize simplicity, stability, and speed, as they do not require sensors or real-time adjustments based on environmental changes. Core principles include predefined input signals controlling actuators directly, making them suitable for repetitive tasks where external disturbances are minimal or predictable.
Fundamentals of Closed-Loop Control Mechanisms
Closed-loop control mechanisms utilize feedback from sensors to continuously adjust a robot's actions, enhancing accuracy and adaptability in dynamic environments. These systems compare the desired setpoint to the actual output, minimizing error through real-time corrections driven by control algorithms such as PID controllers. Unlike open-loop control, closed-loop systems improve stability and performance by compensating for disturbances and uncertainties during operation.
Key Differences Between Open-Loop and Closed-Loop Control
Open-loop control operates without real-time feedback, executing pre-set commands regardless of output performance, which can lead to errors in dynamic environments. Closed-loop control continuously monitors output through sensors, adjusting inputs to maintain desired performance and improve accuracy. Key differences include feedback integration, system adaptability, and error correction capability, with closed-loop control being more robust in handling disturbances.
Advantages of Open-Loop Control in Robotic Applications
Open-loop control systems in robotics offer the advantage of simplicity, reducing design complexity and cost by eliminating the need for feedback sensors. These systems provide fast response times, making them ideal for applications requiring high-speed or repetitive motions without the necessity for precision adjustments. Open-loop control excels in environments where the robotic task is predictable and external disturbances are minimal, ensuring reliability with minimal maintenance.
Benefits of Closed-Loop Control for Robotics Performance
Closed-loop control in robotics enhances precision and adaptability by continuously monitoring feedback from sensors to adjust actuator commands in real-time. This real-time error correction significantly improves accuracy in tasks such as robotic arm positioning and autonomous navigation, reducing the impact of disturbances and system uncertainties. Closed-loop systems also enable better stability and responsiveness, essential for dynamic environments and complex manipulation tasks.
Limitations and Challenges of Open-Loop Control Systems
Open-loop control systems in robotics face significant limitations such as the inability to correct errors or adapt to disturbances since they lack feedback mechanisms. These systems struggle with inaccuracies caused by model uncertainties and external environmental changes, leading to reduced precision and reliability. Maintaining performance without real-time adjustments challenges their effectiveness in complex, dynamic robotic applications.
Common Issues with Closed-Loop Control in Robotics
Closed-loop control in robotics often faces issues with sensor noise, which can lead to inaccurate feedback and unstable system behavior. Latency in the feedback loop may cause delays that degrade real-time response and precision. Additionally, complex tuning of control parameters is required to maintain stability and performance under varying operating conditions.
Typical Use Cases: When to Use Open-Loop vs Closed-Loop Control
Open-loop control is ideal for simple, repetitive tasks where system disturbances are minimal, such as conveyor belt operations or basic robotic arm movements with predictable trajectories. Closed-loop control excels in dynamic environments requiring precision and adaptability, like autonomous vehicles or robotic systems performing complex assembly tasks, where sensor feedback is crucial for error correction. Selecting between open-loop and closed-loop hinges on factors like environmental variability, required accuracy, and real-time response capabilities.
Future Trends in Robotic Control Systems
Future trends in robotic control systems emphasize the integration of advanced closed-loop control methods leveraging real-time sensor feedback and machine learning for enhanced precision and adaptability. Open-loop control remains relevant for simple, predictable tasks but is increasingly supplemented or replaced by closed-loop systems in complex, dynamic environments. The convergence of AI, IoT, and edge computing enables more autonomous, efficient, and resilient robotic control architectures driving innovations across manufacturing, healthcare, and autonomous vehicles.
Open-loop control vs closed-loop control Infographic