Kinematics vs Dynamics explores the difference between motion description and the forces causing it in robotic systems. Actuators vs Sensors highlights the components responsible for movement versus those for environmental perception and feedback. Path Planning vs Motion Control distinguishes between the strategy for route generation and the real-time execution of robot movements.
Table of Comparison
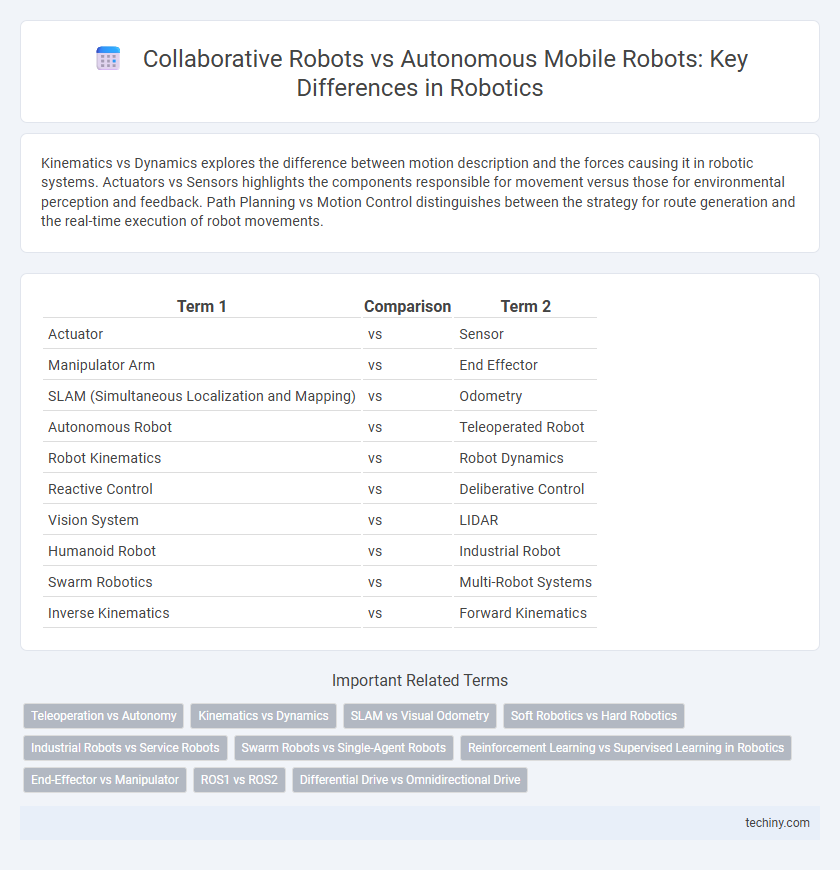
| Term 1 | Comparison | Term 2 |
|---|---|---|
| Actuator | vs | Sensor |
| Manipulator Arm | vs | End Effector |
| SLAM (Simultaneous Localization and Mapping) | vs | Odometry |
| Autonomous Robot | vs | Teleoperated Robot |
| Robot Kinematics | vs | Robot Dynamics |
| Reactive Control | vs | Deliberative Control |
| Vision System | vs | LIDAR |
| Humanoid Robot | vs | Industrial Robot |
| Swarm Robotics | vs | Multi-Robot Systems |
| Inverse Kinematics | vs | Forward Kinematics |
Teleoperation vs Autonomy
Teleoperation relies on human operators remotely controlling robots in real-time, ensuring precise manipulation in complex environments, while autonomy enables robots to perform tasks independently using artificial intelligence and sensor data interpretation. Teleoperated systems excel in scenarios requiring immediate human judgment, such as hazardous material handling, whereas autonomous robots are optimal for repetitive or large-scale operations like warehouse logistics. Integration of hybrid teleoperation-autonomy models enhances operational flexibility, combining human oversight with automated efficiency.
Kinematics vs Dynamics
Kinematics analyzes robot motion through positional data, velocities, and accelerations without considering forces, enabling precise trajectory planning and control. Dynamics examines the forces and torques affecting robotic movement, essential for accurate modeling of robot behavior under external influences and load conditions. Integration of kinematic and dynamic models enhances robotic manipulator performance in tasks demanding both precision and force control.
SLAM vs Visual Odometry
SLAM (Simultaneous Localization and Mapping) integrates sensor data to construct a map and track a robot's position simultaneously, enabling autonomous navigation in unknown environments. Visual Odometry relies solely on camera data to estimate a robot's motion by analyzing successive images, offering lightweight and cost-effective localization. SLAM provides global consistency through loop closure, while Visual Odometry is prone to drift without such corrections.
Soft Robotics vs Hard Robotics
Soft robotics emphasizes flexible, compliant materials such as silicone and elastomers that enable safe interaction with humans and adaptability to unstructured environments. Hard robotics relies on rigid components like metal and plastic, offering precise control, high strength, and durability ideal for industrial automation and heavy-duty tasks. The divergence between soft and hard robotics lies in their material properties, actuation methods, and application domains, with soft robots excelling in delicate manipulation and hard robots dominating in strength-intensive operations.
Industrial Robots vs Service Robots
Industrial robots operate primarily in manufacturing environments, performing repetitive tasks such as welding, assembly, and painting with high precision and speed. Service robots are designed for tasks that directly interact with humans or environments outside factories, including healthcare assistance, cleaning, and delivery. The distinction lies in application domains, with industrial robots emphasizing automation efficiency and service robots prioritizing adaptability and user interaction.
Swarm Robots vs Single-Agent Robots
Swarm robots operate as decentralized, collective units, enabling scalable and flexible task execution through distributed algorithms, whereas single-agent robots function independently with centralized control, focusing on precision and specialized operations. Swarm robotics benefits include robustness to individual failures and enhanced adaptability in complex environments, while single-agent robots excel in tasks requiring high accuracy and sophisticated sensory processing. Applications of swarm robots often involve large-scale environmental monitoring and search-and-rescue missions, contrasting with single-agent robots used in manufacturing automation and surgical robotics.
Reinforcement Learning vs Supervised Learning in Robotics
Reinforcement Learning in robotics enables autonomous agents to learn optimal actions through trial and error, maximizing cumulative rewards in dynamic environments. Supervised Learning relies on labeled datasets to train robots for specific tasks, ensuring accuracy but limiting adaptability to unforeseen scenarios. The choice between Reinforcement Learning and Supervised Learning impacts robot autonomy, with the former favoring exploration and the latter emphasizing precision in predefined tasks.
End-Effector vs Manipulator
End-effector refers to the device or tool attached to the end of a robotic arm designed to interact with the environment, such as grippers, welders, or sensors. Manipulator denotes the entire robotic arm or mechanism responsible for positioning and orienting the end-effector, encompassing joints, links, and actuators. Differentiating these terms is crucial for robotics design, as the manipulator provides movement and reach capabilities, while the end-effector performs the task-specific operation.
ROS1 vs ROS2
ROS1 offers a mature ecosystem with extensive package support and real-time control via ROS Control, while ROS2 introduces DDS-based communication for improved scalability and security in distributed robotic systems. ROS2 enhances multi-robot coordination through native support for QoS policies and incorporates modern middleware, enabling real-time performance and fault tolerance absent in ROS1. Migration from ROS1 to ROS2 involves adapting to new client libraries and middleware interfaces, which improves long-term maintainability and cross-platform compatibility in robotics applications.
Differential Drive vs Omnidirectional Drive
Differential drive robots use two independently controlled wheels on either side, enabling simple and precise tank-like steering, ideal for navigating tight spaces. Omnidirectional drive robots employ multiple wheels arranged to allow movement in any direction without changing orientation, enhancing maneuverability in complex environments. Differential drives prioritize straightforward control and cost efficiency, while omnidirectional drives offer superior agility and smooth lateral transitions.
Sure! Here is a list of niche and specific robotics terms in a "term1 vs term2" format: Infographic