Kinematic redundancy occurs when a robot has more degrees of freedom than necessary to perform a specific task, allowing multiple configurations to achieve the same end-effector position. Dynamic redundancy extends this concept by considering the robot's mass, inertia, and force application, enabling optimization of motion based on dynamics beyond mere positioning. Understanding the trade-offs between kinematic and dynamic redundancy is essential for improving robot efficiency, stability, and adaptability in complex environments.
Table of Comparison
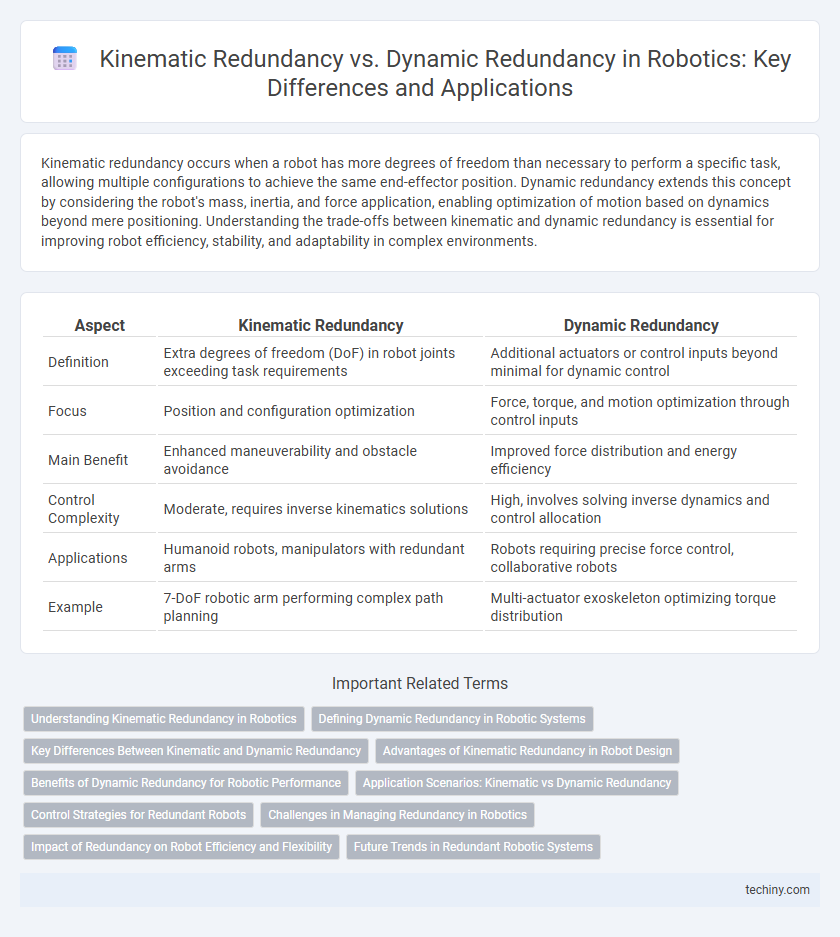
| Aspect | Kinematic Redundancy | Dynamic Redundancy |
|---|---|---|
| Definition | Extra degrees of freedom (DoF) in robot joints exceeding task requirements | Additional actuators or control inputs beyond minimal for dynamic control |
| Focus | Position and configuration optimization | Force, torque, and motion optimization through control inputs |
| Main Benefit | Enhanced maneuverability and obstacle avoidance | Improved force distribution and energy efficiency |
| Control Complexity | Moderate, requires inverse kinematics solutions | High, involves solving inverse dynamics and control allocation |
| Applications | Humanoid robots, manipulators with redundant arms | Robots requiring precise force control, collaborative robots |
| Example | 7-DoF robotic arm performing complex path planning | Multi-actuator exoskeleton optimizing torque distribution |
Understanding Kinematic Redundancy in Robotics
Kinematic redundancy in robotics occurs when a robot possesses more degrees of freedom (DOF) than required to complete a given task, enabling multiple joint configurations to achieve the same end-effector position. This redundancy allows for enhanced maneuverability, obstacle avoidance, and optimization of secondary criteria such as energy efficiency or joint limit avoidance. Unlike dynamic redundancy, which involves excess actuators or control inputs affecting force and motion, kinematic redundancy primarily focuses on the geometric and positional versatility of robot manipulators.
Defining Dynamic Redundancy in Robotic Systems
Dynamic redundancy in robotic systems refers to the presence of additional actuators or degrees of freedom that allow for multiple ways to achieve the same motion or force output, enhancing the system's adaptability and fault tolerance. Unlike kinematic redundancy, which involves extra joints or links to expand motion capabilities, dynamic redundancy emphasizes flexible control of forces and torques during task execution. This concept enables robots to optimize performance criteria such as energy efficiency, load distribution, and precision under varying operational conditions.
Key Differences Between Kinematic and Dynamic Redundancy
Kinematic redundancy refers to a robot having more degrees of freedom than required to perform a task, enabling multiple joint configurations for a single end-effector position, which enhances flexibility and obstacle avoidance. Dynamic redundancy involves excess actuators or control inputs beyond what is necessary to achieve a desired motion, allowing improved force distribution, energy efficiency, and robustness against disturbances. The key difference lies in kinematic redundancy addressing geometric positioning and motion planning, while dynamic redundancy focuses on optimizing control forces and system responsiveness during task execution.
Advantages of Kinematic Redundancy in Robot Design
Kinematic redundancy in robot design enhances flexibility by providing multiple joint configurations to achieve a desired end-effector position, improving obstacle avoidance and fault tolerance. This redundancy allows for optimized motion planning, reducing energy consumption and mechanical stress by selecting joint angles that minimize wear. Compared to dynamic redundancy, kinematic redundancy simplifies control algorithms while maintaining adaptability in complex environments.
Benefits of Dynamic Redundancy for Robotic Performance
Dynamic redundancy enhances robotic performance by enabling robots to utilize extra actuators and degrees of freedom to optimize force distribution, energy efficiency, and adaptability during complex tasks. Unlike kinematic redundancy, which focuses solely on joint configuration, dynamic redundancy improves motion control and stability under varying load conditions, leading to more precise and robust operations. This capability is particularly beneficial in environments requiring high dexterity, collision avoidance, and load balancing.
Application Scenarios: Kinematic vs Dynamic Redundancy
Kinematic redundancy in robotics enhances the robot's ability to avoid obstacles and optimize motion paths by providing multiple joint configurations to achieve the same end-effector position, ideal for tasks like manipulation in cluttered environments. Dynamic redundancy involves having excess actuators or degrees of freedom to control forces and torques, improving stability and load distribution in applications such as heavy payload handling and compliant interaction with uncertain environments. Application scenarios leveraging kinematic redundancy prioritize flexibility and precision in positioning, while dynamic redundancy supports robust control under varying dynamic conditions.
Control Strategies for Redundant Robots
Kinematic redundancy in robotics refers to robots having more degrees of freedom than necessary to perform a task, enabling multiple joint configurations for a single end-effector position. Dynamic redundancy involves extra actuators or control inputs that allow manipulation not only of position but also of forces and torques during motion. Control strategies for redundant robots leverage kinematic redundancy through inverse kinematics algorithms and optimization methods, while dynamic redundancy requires advanced dynamic modeling and real-time feedback control to optimize energy consumption, improve stability, and handle complex interaction forces.
Challenges in Managing Redundancy in Robotics
Kinematic redundancy in robotics involves multiple joint configurations achieving the same end-effector position, complicating inverse kinematics with infinite solutions and requiring efficient optimization algorithms. Dynamic redundancy pertains to the robot's ability to produce various force and motion profiles given actuator capabilities, challenging control systems to manage stability and performance under varying loads. Effectively handling both redundancies demands advanced real-time computation for trajectory planning and adaptive control strategies to ensure precision and reliability in complex tasks.
Impact of Redundancy on Robot Efficiency and Flexibility
Kinematic redundancy enhances robot flexibility by providing multiple joint configurations to achieve the same end-effector position, allowing obstacle avoidance and improved maneuverability in complex environments. Dynamic redundancy influences robot efficiency by enabling optimization of torque distribution and energy consumption through redundant actuators, improving load handling and reducing wear. The integration of both kinematic and dynamic redundancy maximizes robot adaptability and operational performance in diverse tasks.
Future Trends in Redundant Robotic Systems
Future trends in redundant robotic systems emphasize integrating kinematic redundancy with dynamic redundancy to enhance flexibility and precision in complex tasks. Advances in adaptive control algorithms and sensor fusion enable robots to optimize both kinematic configurations and dynamic responses for improved stability and energy efficiency. Research is increasingly focusing on real-time redundancy resolution techniques that leverage AI to predict and adjust robot movements, facilitating safer and more versatile robotic applications in unstructured environments.
Kinematic redundancy vs Dynamic redundancy Infographic