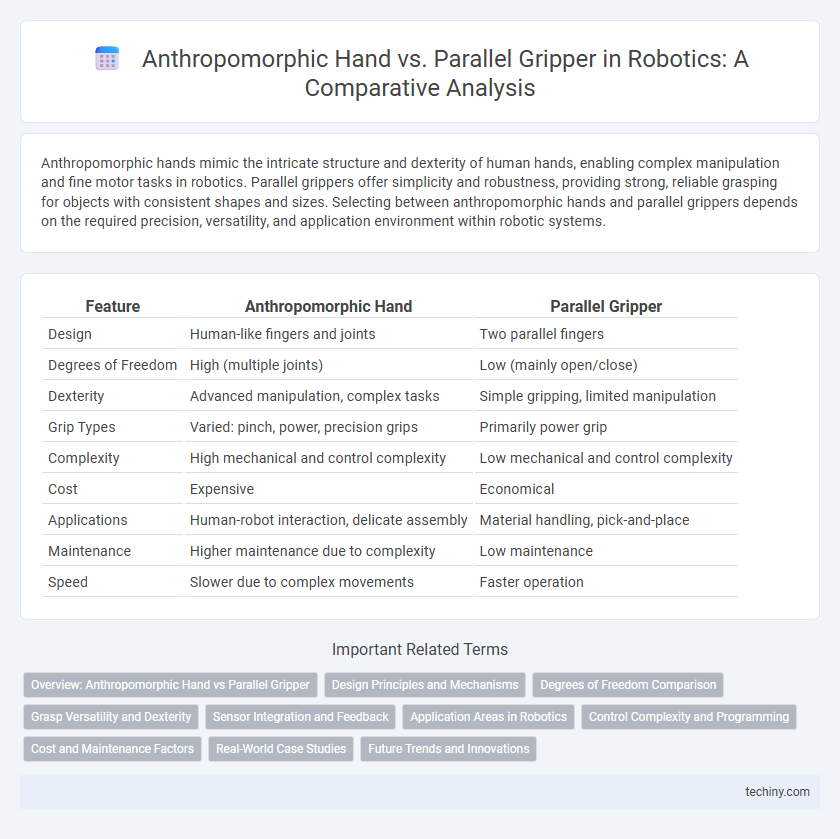
Anthropomorphic hands mimic the intricate structure and dexterity of human hands, enabling complex manipulation and fine motor tasks in robotics. Parallel grippers offer simplicity and robustness, providing strong, reliable grasping for objects with consistent shapes and sizes. Selecting between anthropomorphic hands and parallel grippers depends on the required precision, versatility, and application environment within robotic systems.
Table of Comparison
| Feature | Anthropomorphic Hand | Parallel Gripper |
|---|---|---|
| Design | Human-like fingers and joints | Two parallel fingers |
| Degrees of Freedom | High (multiple joints) | Low (mainly open/close) |
| Dexterity | Advanced manipulation, complex tasks | Simple gripping, limited manipulation |
| Grip Types | Varied: pinch, power, precision grips | Primarily power grip |
| Complexity | High mechanical and control complexity | Low mechanical and control complexity |
| Cost | Expensive | Economical |
| Applications | Human-robot interaction, delicate assembly | Material handling, pick-and-place |
| Maintenance | Higher maintenance due to complexity | Low maintenance |
| Speed | Slower due to complex movements | Faster operation |
Overview: Anthropomorphic Hand vs Parallel Gripper
Anthropomorphic hands mimic the intricate structure and dexterity of the human hand, featuring multiple actuated fingers capable of complex manipulation tasks such as grasping varied shapes and performing precise movements. Parallel grippers employ two opposing fingers moving in parallel, optimized for simplicity, repeatability, and handling uniform objects like boxes or cylindrical items in industrial automation. Choosing between anthropomorphic hands and parallel grippers depends on the application requirements for dexterity, payload capacity, and control complexity in robotics.
Design Principles and Mechanisms
Anthropomorphic hands utilize complex multi-joint designs inspired by the human hand, featuring articulated fingers with multiple degrees of freedom to enable dexterous manipulation and fine motor skills. Parallel grippers operate on simpler mechanical principles, employing two or more parallel fingers that open and close linearly to grasp objects with consistent force and stability, optimized for precision and repeatability in industrial tasks. Design principles of anthropomorphic hands emphasize versatility and adaptability through advanced sensors and actuators, while parallel grippers prioritize robustness, ease of control, and efficient force distribution.
Degrees of Freedom Comparison
Anthropomorphic hands typically feature 15 to 20 degrees of freedom (DoF), enabling complex, human-like dexterity and manipulation of varied objects. In contrast, parallel grippers generally offer 1 to 3 DoF, providing simpler yet robust gripping actions ideal for repetitive industrial tasks. The higher DoF of anthropomorphic hands allows for nuanced control of finger positioning, enhancing adaptability in unstructured environments, whereas parallel grippers prioritize stability and speed in straightforward pick-and-place operations.
Grasp Versatility and Dexterity
Anthropomorphic hands offer superior grasp versatility and dexterity by mimicking the complex movements of the human hand, enabling manipulation of a wide variety of object shapes and sizes. Parallel grippers, while simpler and more robust, excel primarily in handling uniform objects with straightforward grasping motions but lack the nuanced control needed for intricate tasks. This makes anthropomorphic hands ideal for applications requiring delicate manipulation, whereas parallel grippers suit repetitive pick-and-place operations.
Sensor Integration and Feedback
Anthropomorphic hands incorporate advanced sensor integration, including tactile, force, and proprioceptive sensors, enabling precise feedback for dexterous manipulation and adaptive grasping. Parallel grippers typically feature simpler sensor arrays, such as basic force or contact sensors, providing limited tactile information primarily for grip confirmation and basic object detection. Enhanced feedback in anthropomorphic hands supports complex interaction tasks, while parallel grippers prioritize robust and straightforward sensor feedback for industrial automation applications.
Application Areas in Robotics
Anthropomorphic hands are extensively used in robotic applications requiring high dexterity and human-like manipulation, such as prosthetics, delicate assembly, and teleoperation in medical robotics. Parallel grippers dominate industrial sectors focused on pick-and-place tasks, machine tending, and material handling due to their simplicity, reliability, and high gripping force. The choice between anthropomorphic hands and parallel grippers depends on the precision, adaptability, and complexity required by specific application areas in robotics.
Control Complexity and Programming
Anthropomorphic hands require advanced control algorithms due to their multiple degrees of freedom, enabling dexterous manipulation but increasing programming complexity. Parallel grippers offer simpler control schemes with fewer actuators, making them easier to program for repetitive tasks. The choice between these gripper types involves balancing manipulation precision with ease of integration into robotic systems.
Cost and Maintenance Factors
Anthropomorphic robotic hands typically incur higher costs due to their complex design and numerous degrees of freedom, which also lead to increased maintenance requirements and parts replacement. In contrast, parallel grippers feature simpler mechanical structures that reduce initial investment and demand less frequent upkeep, making them more cost-effective for repetitive, straightforward gripping tasks. The choice between these end-effectors hinges on balancing functional versatility against budget constraints and long-term maintenance efficiency.
Real-World Case Studies
Anthropomorphic hands replicate human finger dexterity, enabling complex object manipulation in real-world cases such as prosthetics and delicate assembly tasks. Parallel grippers provide simplified, reliable gripping through two or more fingers moving in parallel, excelling in industrial applications like pick-and-place operations and packaging. Case studies reveal anthropomorphic hands improve adaptability for irregular objects, while parallel grippers offer robustness and faster cycle times in repetitive manufacturing environments.
Future Trends and Innovations
Advancements in robotics emphasize anthropomorphic hands for enhanced dexterity, mimicking human finger movements to handle complex, delicate tasks with precision. Parallel grippers remain preferred for their simplicity and reliability in industrial automation, but innovations in sensor integration and adaptive grip strength are bridging performance gaps. Future trends prioritize combining AI-driven control systems with soft robotics to create hybrid grippers that maximize versatility and efficiency in diverse environments.
Anthropomorphic hand vs Parallel gripper Infographic