Simulated environments enable rapid prototyping and controlled testing of robotic systems without the risks and costs associated with real-world deployment. These virtual settings provide valuable data for refining algorithms and sensor integration, yet they often fail to capture the unpredictable variability and complex interactions present in real environments. Real-world testing remains essential to validate robotic performance, ensure robustness, and identify unforeseen challenges that simulations may not predict.
Table of Comparison
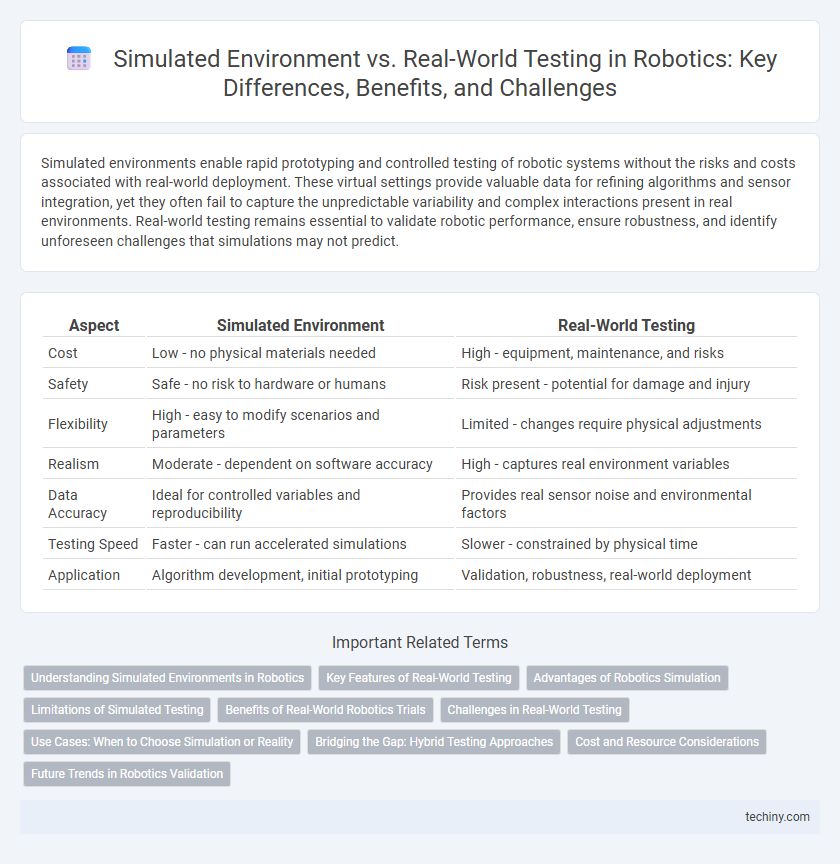
| Aspect | Simulated Environment | Real-World Testing |
|---|---|---|
| Cost | Low - no physical materials needed | High - equipment, maintenance, and risks |
| Safety | Safe - no risk to hardware or humans | Risk present - potential for damage and injury |
| Flexibility | High - easy to modify scenarios and parameters | Limited - changes require physical adjustments |
| Realism | Moderate - dependent on software accuracy | High - captures real environment variables |
| Data Accuracy | Ideal for controlled variables and reproducibility | Provides real sensor noise and environmental factors |
| Testing Speed | Faster - can run accelerated simulations | Slower - constrained by physical time |
| Application | Algorithm development, initial prototyping | Validation, robustness, real-world deployment |
Understanding Simulated Environments in Robotics
Simulated environments in robotics provide controlled, repeatable conditions for testing algorithms and systems without physical risks or high costs. Advanced simulators replicate real-world physics, sensor inputs, and interactions, enabling developers to validate robot behavior before deployment. These virtual platforms accelerate development cycles and improve safety by allowing extensive experimentation and debugging that might be impractical in physical settings.
Key Features of Real-World Testing
Real-world testing in robotics provides critical validation of sensor accuracy, actuator reliability, and environmental adaptability under unpredictable conditions. It ensures robots can handle dynamic obstacles, varying lighting, and physical interactions that simulated environments often fail to replicate. Essential for safety certification and performance benchmarking, real-world testing bridges the gap between theoretical models and practical deployment.
Advantages of Robotics Simulation
Robotics simulation offers significant advantages such as cost efficiency by reducing the need for expensive physical prototypes and minimizing risk during early development stages. It enables rapid iteration and testing of complex algorithms in controlled, repeatable virtual scenarios that would be difficult to replicate in real-world environments. High-fidelity simulations improve training accuracy and system robustness by allowing engineers to analyze performance under diverse conditions without hardware wear and environmental limitations.
Limitations of Simulated Testing
Simulated environments allow for rapid iteration and risk-free trials, but they often lack the complexity and unpredictability of real-world conditions, leading to potential discrepancies in robot behavior. Sensor noise, environmental variability, and unforeseen obstacles are challenging to replicate accurately in simulations, causing models to perform differently when deployed physically. These limitations necessitate complementary real-world testing to validate and refine robotic systems beyond simulated scenarios.
Benefits of Real-World Robotics Trials
Real-world robotics trials provide invaluable data on system performance under unpredictable and dynamic conditions that simulations may overlook, enhancing reliability and robustness. They enable direct interaction with physical objects and environments, uncovering challenges related to hardware limitations, sensor noise, and environmental variability. This hands-on testing accelerates practical improvements and ensures algorithms are effectively transferable to real-world applications.
Challenges in Real-World Testing
Real-world testing in robotics faces challenges such as unpredictable environmental variables, hardware malfunctions, and safety risks to both robots and humans. Unlike simulated environments, real-world scenarios require robots to adapt to dynamic and unstructured conditions, increasing complexity in sensor accuracy and decision-making processes. Ensuring reliability and robustness in real-world testing demands extensive data collection, real-time error detection, and recovery mechanisms.
Use Cases: When to Choose Simulation or Reality
Simulated environments provide a safe, cost-effective platform for initial robotics algorithm development, allowing rapid iteration and risk-free testing of complex scenarios that may be impractical or dangerous in the real world. Real-world testing becomes essential when assessing sensor accuracy, mechanical reliability, and environmental interactions, ensuring that robots perform robustly under unpredictable and dynamic conditions. Selecting between simulation and reality depends on project phase, risk tolerance, and the criticality of accurate physical feedback for validating system performance.
Bridging the Gap: Hybrid Testing Approaches
Hybrid testing approaches in robotics integrate simulated environments with real-world testing to enhance system reliability and reduce development costs. Simulated environments provide scalable and safe scenarios for initial algorithmic validation, while real-world testing addresses physical uncertainties such as sensor noise and unexpected obstacles. Combining both methods accelerates iterative improvements and bridges the gap between virtual predictions and practical performance in robotic systems.
Cost and Resource Considerations
Simulated environments significantly reduce costs and resource requirements compared to real-world testing by enabling extensive trial runs without physical wear or component replacement. Virtual simulations allow rapid iteration and scalability, minimizing expenses related to hardware failures, safety hazards, and environmental setup. Real-world testing remains indispensable for validating system robustness, but its higher operational costs and resource consumption limit frequent experimentation.
Future Trends in Robotics Validation
Simulated environments enable extensive iterative testing and data collection, accelerating the validation process with controlled variables and reduced costs. Real-world testing remains crucial to capture unpredictable dynamics and sensor noise, ensuring robustness and safety in diverse conditions. Future trends emphasize hybrid validation frameworks that integrate high-fidelity simulations with real-world trials, leveraging AI-driven adaptation to enhance accuracy and scalability in robotics development.
Simulated environment vs real-world testing Infographic