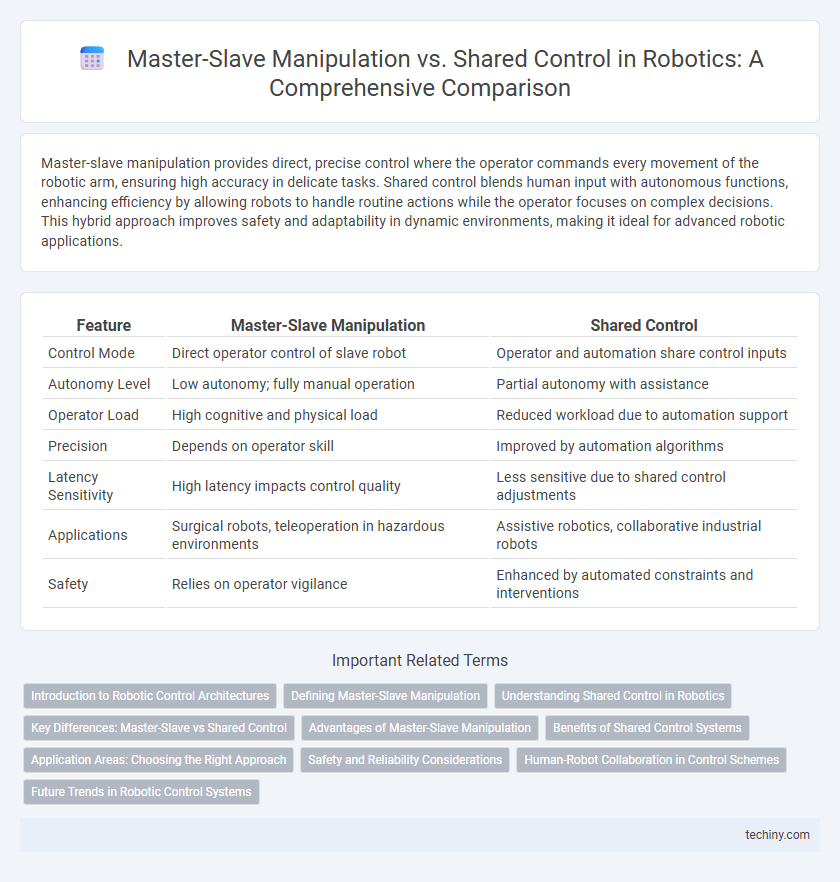
Master-slave manipulation provides direct, precise control where the operator commands every movement of the robotic arm, ensuring high accuracy in delicate tasks. Shared control blends human input with autonomous functions, enhancing efficiency by allowing robots to handle routine actions while the operator focuses on complex decisions. This hybrid approach improves safety and adaptability in dynamic environments, making it ideal for advanced robotic applications.
Table of Comparison
| Feature | Master-Slave Manipulation | Shared Control |
|---|---|---|
| Control Mode | Direct operator control of slave robot | Operator and automation share control inputs |
| Autonomy Level | Low autonomy; fully manual operation | Partial autonomy with assistance |
| Operator Load | High cognitive and physical load | Reduced workload due to automation support |
| Precision | Depends on operator skill | Improved by automation algorithms |
| Latency Sensitivity | High latency impacts control quality | Less sensitive due to shared control adjustments |
| Applications | Surgical robots, teleoperation in hazardous environments | Assistive robotics, collaborative industrial robots |
| Safety | Relies on operator vigilance | Enhanced by automated constraints and interventions |
Introduction to Robotic Control Architectures
Master-slave manipulation architecture relies on direct mapping of human operator inputs to robotic actuators, ensuring precise control in teleoperation tasks. Shared control integrates autonomous system behaviors with human commands, enhancing adaptability and reducing operator workload in complex environments. Both architectures are pivotal in advancing robotic control, with trade-offs between operator precision and system autonomy shaping their application domains.
Defining Master-Slave Manipulation
Master-Slave Manipulation is a robotic control paradigm where the operator (master) directly controls the robot (slave) in real time, with the slave device replicating every movement of the master device precisely. This method enables high fidelity in teleoperation, crucial for applications requiring fine motor skills such as surgical robotics and remote handling in hazardous environments. The system's effectiveness depends on minimal latency and accurate force feedback to maintain the operator's situational awareness and dexterity.
Understanding Shared Control in Robotics
Shared control in robotics integrates human input with autonomous system capabilities, allowing for dynamic adjustment of control authority based on task complexity and environmental conditions. This collaborative approach enhances precision, safety, and efficiency in manipulation tasks by leveraging the strengths of both human intuition and robotic automation. Unlike master-slave manipulation, where the human exerts direct control over every action, shared control enables seamless cooperation between operator and robot, optimizing performance in complex or unpredictable scenarios.
Key Differences: Master-Slave vs Shared Control
Master-Slave manipulation relies on direct operator control where the master's movements are precisely duplicated by the slave robot, ensuring high precision and predictability in tasks requiring fine motor skills. Shared control combines human input with autonomous robot functions, allowing the system to optimize performance by blending operator commands with automated decision-making for safety and efficiency. Key differences include the level of autonomy, with Master-Slave systems offering full manual control versus Shared Control systems integrating AI to assist or override human inputs when necessary.
Advantages of Master-Slave Manipulation
Master-slave manipulation offers precise and intuitive control by directly mapping operator inputs to robotic actions, allowing expert users to perform delicate tasks with high accuracy. This method reduces ambiguity and latency since the slave robot replicates movements in real time, enhancing responsiveness in teleoperation scenarios. Its clear hierarchical structure simplifies system design and improves safety by providing predictable robot behavior under the operator's full control.
Benefits of Shared Control Systems
Shared control systems enhance robotic manipulation by combining human intuition with autonomous precision, resulting in improved task accuracy and reduced operator workload. These systems adapt dynamically to environmental changes, increasing safety and flexibility in complex or unpredictable scenarios. The collaboration between human and robot optimizes decision-making processes, leading to faster completion and higher reliability in various industrial and medical applications.
Application Areas: Choosing the Right Approach
Master-slave manipulation excels in high-precision medical procedures and hazardous environments, where direct human control ensures accuracy and safety. Shared control is ideal for autonomous vehicles and industrial automation, blending human intuition with algorithmic efficiency to handle complex tasks. Selecting the appropriate approach depends on the required level of autonomy, task complexity, and safety considerations specific to each application area.
Safety and Reliability Considerations
Master-Slave Manipulation offers precise operator control, but relies heavily on continuous stable communication, posing risks if delays or failures occur, which can compromise safety. Shared Control integrates autonomous safety protocols with human input, enhancing reliability by allowing the system to override unsafe commands and reduce operator workload. Safety-critical applications benefit from Shared Control's fail-safe mechanisms, though Master-Slave configurations provide superior transparency and predictability in direct teleoperation.
Human-Robot Collaboration in Control Schemes
Master-Slave manipulation in robotics involves a human operator directly controlling a robot manipulator, ensuring precise execution of tasks through real-time feedback and teleoperation, which is critical in high-stakes environments like surgery and hazardous material handling. Shared control schemes enhance human-robot collaboration by blending autonomous robot decision-making with human inputs, optimizing task efficiency and safety through adaptable assistance and error correction. These control methodologies emphasize seamless integration of human expertise with robotic precision, enabling superior performance in complex manipulation tasks.
Future Trends in Robotic Control Systems
Future trends in robotic control systems emphasize the evolution from traditional master-slave manipulation towards advanced shared control frameworks that integrate human expertise with autonomous decision-making. Enhanced sensor fusion, real-time adaptive algorithms, and artificial intelligence enable more intuitive collaboration and increased precision in complex tasks. Emerging developments focus on improving safety, responsiveness, and efficiency in applications such as medical robotics, industrial automation, and remote operations.
Master-Slave Manipulation vs Shared Control Infographic