Simulation-based testing in robotics offers a controlled, cost-effective environment to evaluate algorithms and system behaviors before deployment, reducing risks associated with hardware damage or safety hazards. Real-world testing provides invaluable insights into unpredictable variables such as sensor noise, environmental dynamics, and physical interactions that simulations may not fully capture. Combining both methods enhances overall reliability by leveraging the precision of simulations and the authenticity of real-world conditions.
Table of Comparison
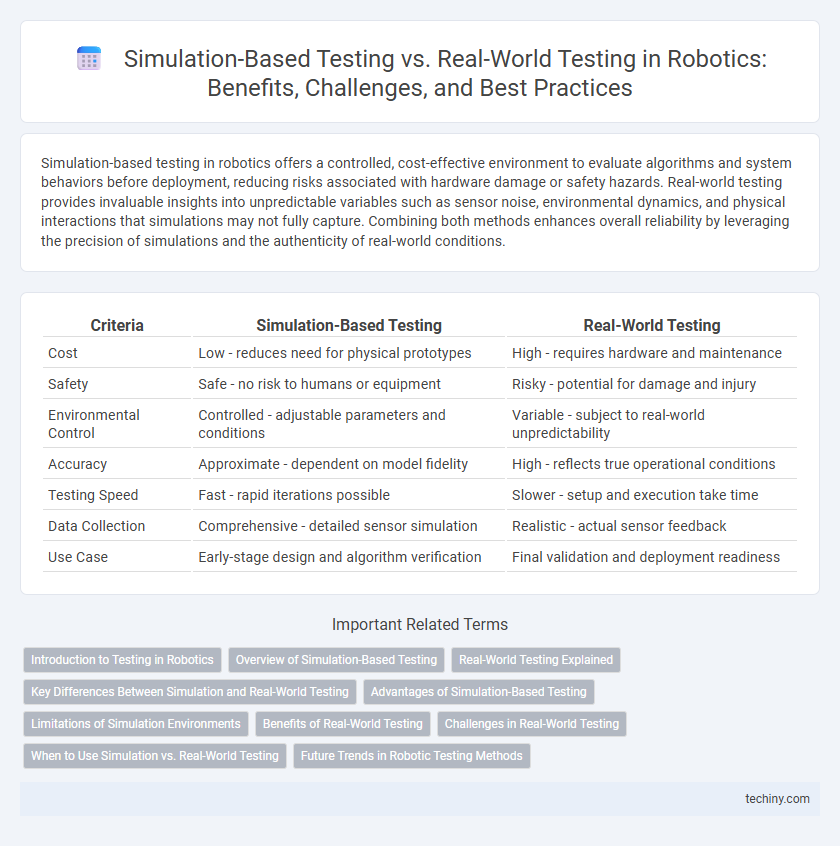
| Criteria | Simulation-Based Testing | Real-World Testing |
|---|---|---|
| Cost | Low - reduces need for physical prototypes | High - requires hardware and maintenance |
| Safety | Safe - no risk to humans or equipment | Risky - potential for damage and injury |
| Environmental Control | Controlled - adjustable parameters and conditions | Variable - subject to real-world unpredictability |
| Accuracy | Approximate - dependent on model fidelity | High - reflects true operational conditions |
| Testing Speed | Fast - rapid iterations possible | Slower - setup and execution take time |
| Data Collection | Comprehensive - detailed sensor simulation | Realistic - actual sensor feedback |
| Use Case | Early-stage design and algorithm verification | Final validation and deployment readiness |
Introduction to Testing in Robotics
Simulation-based testing in robotics offers a controlled environment to evaluate algorithms, sensor integration, and robot behavior without physical risks, enabling rapid iteration and cost efficiency. Real-world testing validates these systems under unpredictable conditions, capturing complex environmental interactions and hardware limitations that simulations might overlook. Combining both approaches enhances robustness, accelerates development cycles, and ensures reliable robotic performance across diverse operational scenarios.
Overview of Simulation-Based Testing
Simulation-based testing in robotics involves creating virtual environments to evaluate robotic systems' performance, reducing time and costs associated with physical trials. This method enables rapid prototyping, identifying potential flaws in control algorithms or hardware integration before deployment. High-fidelity simulators replicate real-world physics and sensor data, allowing extensive scenario coverage that enhances safety and reliability in robot development.
Real-World Testing Explained
Real-world testing in robotics involves evaluating robot systems in the physical environments where they are intended to operate, providing accurate feedback on performance, robustness, and safety under actual conditions. Unlike simulation-based testing, real-world testing captures unpredictable factors such as sensor noise, environmental variability, and complex human-robot interactions, which are difficult to replicate digitally. This process is essential for validating the practical functionality and reliability of robotic systems before commercial deployment.
Key Differences Between Simulation and Real-World Testing
Simulation-based testing in robotics allows for rapid iteration and safe experimentation in controlled virtual environments, enabling the analysis of complex scenarios without physical risks or costs. Real-world testing provides invaluable data on environmental unpredictability, hardware limitations, and sensor noise that simulations cannot fully replicate. Key differences include the level of realism, risk exposure, and the fidelity of physical interactions, making a combined approach essential for robust robotic system validation.
Advantages of Simulation-Based Testing
Simulation-based testing in robotics offers precise control over environmental variables, enabling consistent reproduction of complex scenarios without physical risks or wear on equipment. It significantly reduces development time and costs by facilitating rapid iteration and early detection of software bugs before deployment in real-world conditions. Virtual environments provide access to diverse and extreme conditions that are otherwise impractical or unsafe to replicate physically, enhancing robustness and reliability of robotic systems.
Limitations of Simulation Environments
Simulation environments for robotics often struggle to accurately replicate complex real-world dynamics, including sensor noise, unmodeled physical interactions, and environmental variability, which can lead to discrepancies in robot performance. Limitations in simulating unpredictable human behaviors and dynamic obstacles reduce the reliability of simulation-based testing for autonomous systems. Consequently, purely simulation-based validation may overlook critical failure modes that only emerge during real-world deployment.
Benefits of Real-World Testing
Real-world testing in robotics provides critical insights into unpredictable environmental variables and sensor noise that simulations often fail to replicate accurately. It enables validation of robot performance in complex, dynamic scenarios, ensuring reliability and safety standards are met before deployment. Direct interaction with physical components uncovers hardware limitations and integration issues that simulation-based testing might overlook.
Challenges in Real-World Testing
Real-world testing in robotics faces significant challenges, including unpredictable environmental variables, safety risks to humans and equipment, and high operational costs. Robots must handle dynamic and unstructured environments, which can cause failures not evident in controlled simulations. These factors complicate iteration speed and scalability, making real-world testing resource-intensive compared to simulation-based alternatives.
When to Use Simulation vs. Real-World Testing
Simulation-based testing excels in early-stage robotics development by enabling rapid iteration and risk-free evaluation of algorithms under diverse virtual scenarios. Real-world testing becomes crucial when validating hardware integration, sensor accuracy, and environmental interactions that are difficult to replicate in simulations. Combining both approaches ensures comprehensive performance assessment, balancing cost-efficiency with practical reliability.
Future Trends in Robotic Testing Methods
Simulation-based testing in robotics enables rapid iteration and risk-free evaluation of complex scenarios through virtual environments powered by advanced physics engines and AI-driven models. Emerging trends highlight the integration of digital twins and augmented reality to enhance fidelity and predictive accuracy, bridging gaps between simulated and physical testing outcomes. Hybrid testing frameworks combining real-world data with simulation analytics will dominate future robotic validation, accelerating innovation and reliability in autonomous systems.
Simulation-based testing vs real-world testing Infographic