Series manipulators offer high flexibility and large workspace due to their sequential link arrangement, making them ideal for tasks requiring complex movements. Parallel manipulators provide superior rigidity, precision, and load capacity by distributing forces across multiple arms working simultaneously. Choosing between them depends on the specific application requirements, balancing accuracy, speed, and structural stiffness.
Table of Comparison
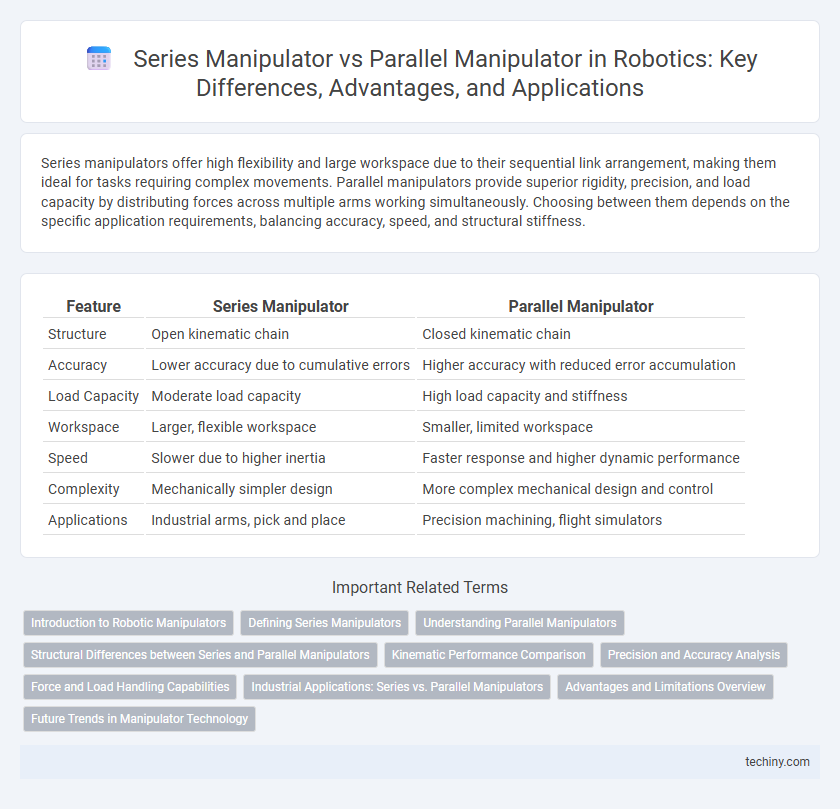
| Feature | Series Manipulator | Parallel Manipulator |
|---|---|---|
| Structure | Open kinematic chain | Closed kinematic chain |
| Accuracy | Lower accuracy due to cumulative errors | Higher accuracy with reduced error accumulation |
| Load Capacity | Moderate load capacity | High load capacity and stiffness |
| Workspace | Larger, flexible workspace | Smaller, limited workspace |
| Speed | Slower due to higher inertia | Faster response and higher dynamic performance |
| Complexity | Mechanically simpler design | More complex mechanical design and control |
| Applications | Industrial arms, pick and place | Precision machining, flight simulators |
Introduction to Robotic Manipulators
Robotic manipulators are mechanical devices designed to simulate human arm movements for various applications in automation and manufacturing. Series manipulators consist of a sequence of joints and links arranged in a serial chain, offering high flexibility and large workspace but limited load capacity and precision. Parallel manipulators feature multiple kinematic chains connecting the base to the end-effector, providing enhanced stiffness, higher payload, and superior accuracy due to their closed-loop structure.
Defining Series Manipulators
Series manipulators consist of a sequence of links connected end-to-end by joints, where each joint contributes to the overall degrees of freedom and positioning of the end effector. This configuration allows for a wide range of motion and flexibility but often results in lower stiffness and reduced load capacity compared to parallel manipulators. Key examples include robotic arms used in manufacturing and assembly lines where precise and versatile movement is essential.
Understanding Parallel Manipulators
Parallel manipulators feature multiple kinematic chains connecting the base to the end-effector, providing higher stiffness and accuracy compared to series manipulators. Their architecture enables reduced error accumulation and improved load-bearing capacity, making them ideal for precision tasks in robotics. Applications include flight simulators, robotic surgery, and high-speed machining, where stability and repeatability are critical.
Structural Differences between Series and Parallel Manipulators
Series manipulators consist of a chain of links connected end-to-end, resulting in a serial kinematic chain that typically offers a larger workspace but lower stiffness and load capacity. Parallel manipulators feature multiple kinematic chains linking the base and the end-effector simultaneously, providing higher structural rigidity, improved precision, and greater load-bearing capabilities but a more limited workspace. Structural differences in joint arrangement and load distribution directly influence the manipulators' performance in terms of accuracy, speed, and application suitability.
Kinematic Performance Comparison
Series manipulators offer greater workspace and simpler kinematic chains, enabling easier control and precise path planning, but often suffer from lower stiffness and payload capacity. Parallel manipulators exhibit higher structural rigidity due to closed-loop kinematics, resulting in superior accuracy, faster dynamic response, and enhanced load-bearing capabilities within a limited workspace. Kinematic performance depends on factors like singularity configurations, Jacobian matrix condition number, and workspace dexterity, with parallel manipulators excelling in stiffness and dynamic behavior while series manipulators provide greater reach and flexibility.
Precision and Accuracy Analysis
Series manipulators typically offer higher precision due to their sequential joint configurations that allow fine control over each degree of freedom. Parallel manipulators exhibit superior accuracy by distributing loads across multiple kinematic chains, reducing error accumulation and enhancing stiffness. Analysis indicates that while series manipulators excel in repeatability, parallel manipulators provide greater positional accuracy in complex tasks.
Force and Load Handling Capabilities
Series manipulators offer greater reach and flexibility but typically exhibit lower stiffness and reduced load-bearing capacity compared to parallel manipulators. Parallel manipulators provide enhanced force distribution and higher rigidity due to their closed-loop kinematic chains, enabling superior load handling and precision under heavy forces. This structural design advantage makes parallel manipulators preferable for high-force applications requiring stability and accuracy.
Industrial Applications: Series vs. Parallel Manipulators
Series manipulators dominate industrial applications requiring large work envelopes and flexible task execution due to their extended reach and simpler control systems. Parallel manipulators excel in high-precision tasks such as assembly, machining, and surgical robotics, offering superior stiffness, payload capacity, and dynamic response. Selecting between series and parallel manipulators depends on the specific industrial requirements of accuracy, speed, and workspace configuration.
Advantages and Limitations Overview
Series manipulators offer a wide workspace and high flexibility, making them ideal for tasks requiring complex and precise movements, but they often suffer from lower stiffness and payload capacity. Parallel manipulators provide superior rigidity and load-bearing capabilities with high accuracy, yet their limited workspace and complex control algorithms restrict their application to specialized tasks. Understanding these trade-offs is crucial for selecting the appropriate manipulator type based on specific robotic operation requirements.
Future Trends in Manipulator Technology
Future trends in manipulator technology highlight advancements in hybrid manipulators that combine the flexibility of series manipulators with the precision and rigidity of parallel manipulators. Integration of AI-driven control systems and adaptive materials enhances the performance, adaptability, and energy efficiency of robotic arms in industrial and medical applications. Emerging research emphasizes improved kinematic configurations and real-time sensory feedback to optimize payload capacity while minimizing computational complexity.
series manipulator vs parallel manipulator Infographic