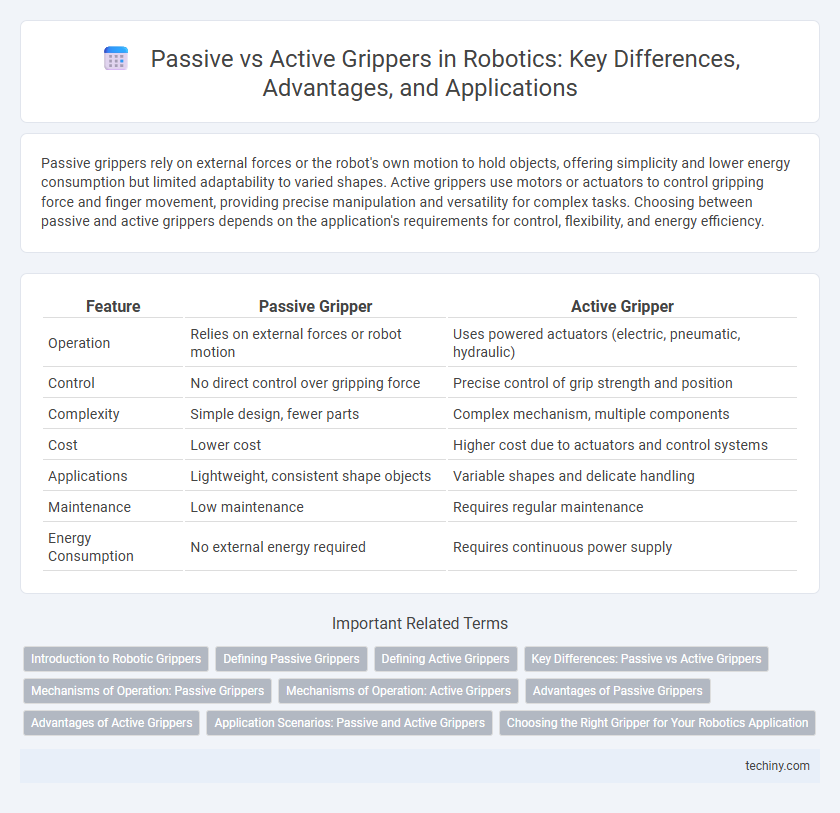
Passive grippers rely on external forces or the robot's own motion to hold objects, offering simplicity and lower energy consumption but limited adaptability to varied shapes. Active grippers use motors or actuators to control gripping force and finger movement, providing precise manipulation and versatility for complex tasks. Choosing between passive and active grippers depends on the application's requirements for control, flexibility, and energy efficiency.
Table of Comparison
| Feature | Passive Gripper | Active Gripper |
|---|---|---|
| Operation | Relies on external forces or robot motion | Uses powered actuators (electric, pneumatic, hydraulic) |
| Control | No direct control over gripping force | Precise control of grip strength and position |
| Complexity | Simple design, fewer parts | Complex mechanism, multiple components |
| Cost | Lower cost | Higher cost due to actuators and control systems |
| Applications | Lightweight, consistent shape objects | Variable shapes and delicate handling |
| Maintenance | Low maintenance | Requires regular maintenance |
| Energy Consumption | No external energy required | Requires continuous power supply |
Introduction to Robotic Grippers
Robotic grippers are essential end-effectors used for manipulating objects in automation, categorized mainly into passive and active types. Passive grippers rely on mechanical or environmental forces without motors for holding objects, offering simplicity and cost-effectiveness but limited adaptability. Active grippers incorporate actuators and sensors to actively control grip strength and movement, enabling precise handling of diverse shapes and sizes in complex robotic tasks.
Defining Passive Grippers
Passive grippers rely on the robot's motion or external forces to secure objects without using motors or actuators, making them simpler and more energy-efficient. They typically use mechanical features like springs, friction, or compliant materials to hold items, enabling quick and low-maintenance operation. Passive grippers excel in applications requiring gentle handling and adaptability to varying object shapes without complex control systems.
Defining Active Grippers
Active grippers utilize powered actuators such as electric motors, pneumatics, or hydraulics to control the gripping force and movement with high precision. These devices enable complex manipulation tasks by adjusting grip strength dynamically, allowing for secure handling of diverse objects in robotics applications. Unlike passive grippers, active grippers offer enhanced adaptability and versatility in environments demanding precise control and robust performance.
Key Differences: Passive vs Active Grippers
Passive grippers rely on external forces or gravity to hold objects, making them simpler and more energy-efficient but less versatile in handling diverse shapes and weights. Active grippers use actuators powered by electricity, pneumatics, or hydraulics to control grip strength and movement, providing precise handling and adaptability for complex tasks. Key differences include control mechanisms, energy consumption, and application flexibility, with active grippers excelling in dynamic environments while passive grippers suit low-power, straightforward grips.
Mechanisms of Operation: Passive Grippers
Passive grippers rely on their mechanical structure and external forces such as gravity, friction, or manual intervention to hold objects securely without the need for powered actuation. Their operation typically involves compliant materials or spring mechanisms that automatically conform to the object's shape under external pressure, enhancing grip stability. This simplicity in mechanism reduces energy consumption and maintenance requirements compared to active grippers, making them suitable for handling fragile or irregularly shaped items in robotic applications.
Mechanisms of Operation: Active Grippers
Active grippers employ powered actuators such as electric motors, pneumatic cylinders, or hydraulic systems to manipulate objects with precise control and adjustable force. These mechanisms enable complex movements including gripping, rotating, and releasing items, making active grippers ideal for versatile automation tasks. Sensors integrated with active grippers provide real-time feedback to optimize grip strength and ensure accurate object handling in dynamic environments.
Advantages of Passive Grippers
Passive grippers offer the advantage of simplicity and energy efficiency by relying on mechanical compliance and environmental forces rather than external power sources, making them ideal for lightweight and repetitive tasks. Their low cost and easy maintenance reduce operational downtime and increase reliability in manufacturing processes. These grippers excel in handling fragile or irregularly shaped objects without the need for complex control systems.
Advantages of Active Grippers
Active grippers in robotics offer precise control and adaptability through integrated sensors and actuators, enabling them to handle a wide variety of objects with different shapes and materials. They provide enhanced gripping force and can adjust grip dynamically in response to feedback, reducing the risk of slippage or damage during manipulation. This versatility makes active grippers ideal for complex automation tasks such as assembly, packaging, and delicate object handling in industrial and service robots.
Application Scenarios: Passive and Active Grippers
Passive grippers excel in handling objects with consistent shapes and surfaces, making them ideal for lightweight assembly and packaging tasks where simplicity and speed are crucial. Active grippers offer enhanced adaptability and precision for complex manipulation, suitable for environments requiring variable grip strength and dexterous control, such as electronics assembly and delicate material handling. Choosing between passive and active grippers depends on application scenarios demanding either efficiency for repetitive tasks or flexibility in diverse and sensitive operations.
Choosing the Right Gripper for Your Robotics Application
Selecting the right gripper for robotics applications involves evaluating the specific task requirements, payload, and environment. Passive grippers excel in simplicity and energy efficiency, relying on the object's shape and gravity for secure holding, suitable for lightweight and predictable objects. Active grippers provide controlled gripping force and adaptability through sensors and actuators, ideal for handling varied, delicate, or complex components with precision in dynamic environments.
Passive gripper vs Active gripper Infographic