Robotic systems excel in structured environments where predefined layouts and predictable variables enable precise navigation and task execution. In contrast, unstructured environments demand advanced perception, adaptive algorithms, and real-time decision-making to handle dynamic obstacles and uncertain conditions effectively. Optimizing robots for these differing settings requires tailored sensor integration and control strategies to maximize performance and reliability.
Table of Comparison
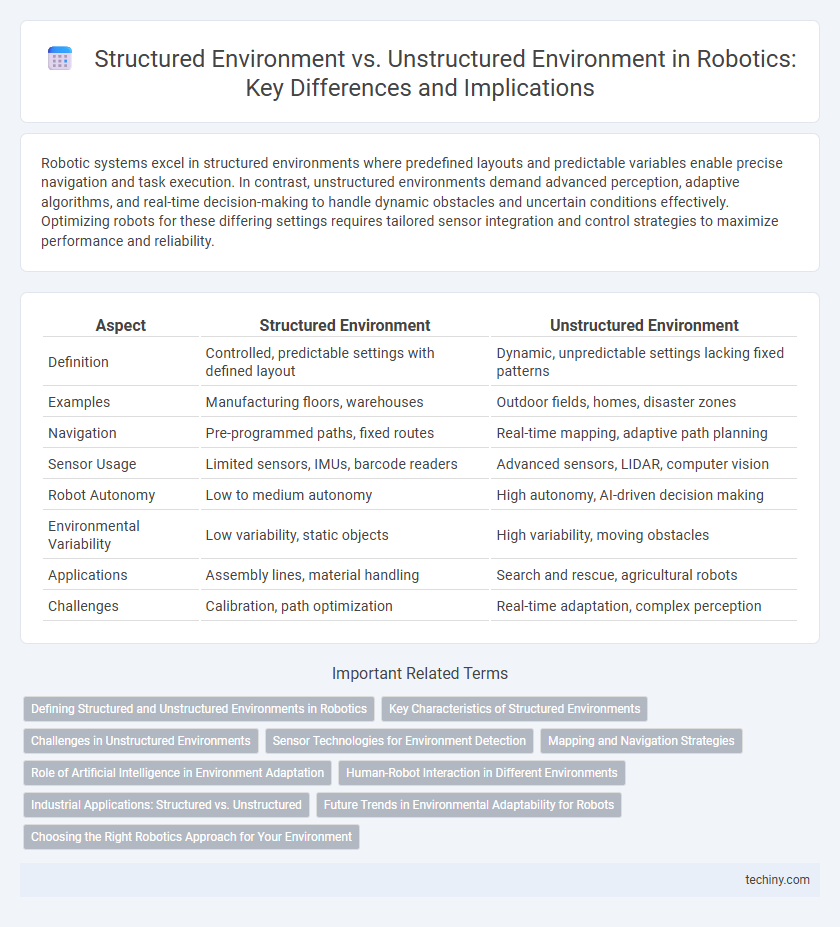
| Aspect | Structured Environment | Unstructured Environment |
|---|---|---|
| Definition | Controlled, predictable settings with defined layout | Dynamic, unpredictable settings lacking fixed patterns |
| Examples | Manufacturing floors, warehouses | Outdoor fields, homes, disaster zones |
| Navigation | Pre-programmed paths, fixed routes | Real-time mapping, adaptive path planning |
| Sensor Usage | Limited sensors, IMUs, barcode readers | Advanced sensors, LIDAR, computer vision |
| Robot Autonomy | Low to medium autonomy | High autonomy, AI-driven decision making |
| Environmental Variability | Low variability, static objects | High variability, moving obstacles |
| Applications | Assembly lines, material handling | Search and rescue, agricultural robots |
| Challenges | Calibration, path optimization | Real-time adaptation, complex perception |
Defining Structured and Unstructured Environments in Robotics
Structured environments in robotics refer to controlled settings with predictable layouts and minimal variability, such as assembly lines or warehouses, where robots operate using predefined paths and sensors optimized for known obstacles. Unstructured environments involve dynamic, unpredictable conditions like outdoor or home settings, requiring advanced perception, adaptive algorithms, and machine learning for real-time decision-making. The distinction is crucial for designing robotic systems tailored to their operational contexts, enhancing efficiency and robustness.
Key Characteristics of Structured Environments
Structured environments in robotics feature predictable layouts, consistent lighting, and well-defined boundaries that enable precise navigation and efficient task execution. These environments facilitate the use of pre-programmed paths and sensor data for real-time adjustments, enhancing robot accuracy and reducing error rates. Industrial manufacturing floors, warehouses, and assembly lines exemplify structured environments optimized for robotic automation.
Challenges in Unstructured Environments
Unstructured environments pose significant challenges for robotics due to unpredictable variables, irregular surfaces, and dynamic obstacles that hinder sensor accuracy and navigation algorithms. Robots must process vast amounts of real-time data to adapt to diverse lighting, weather conditions, and unexpected object arrangements, demanding advanced perception and decision-making systems. Robust machine learning models and adaptive control mechanisms are essential to overcome the complexities inherent in non-deterministic, unstructured settings.
Sensor Technologies for Environment Detection
Sensor technologies in robotics vary significantly between structured and unstructured environments, with LiDAR and ultrasonic sensors excelling in structured settings due to predictable layouts and minimal dynamic obstacles. In unstructured environments, advanced vision systems integrating RGB-D cameras and machine learning algorithms provide crucial data for complex terrain analysis and object recognition. Combining inertial measurement units (IMUs) with sensor fusion techniques enhances robot navigation accuracy, enabling effective adaptation to variable and unpredictable surroundings.
Mapping and Navigation Strategies
Mapping and navigation strategies in robotics significantly differ between structured and unstructured environments, with structured settings relying on predefined maps and static landmarks to enable precise path planning. In contrast, unstructured environments demand adaptive algorithms like simultaneous localization and mapping (SLAM) to dynamically generate maps while navigating unpredictable terrain. Sensor fusion, incorporating LiDAR, cameras, and inertial measurement units (IMUs), plays a critical role in enhancing localization accuracy and obstacle avoidance in complex, unstructured spaces.
Role of Artificial Intelligence in Environment Adaptation
Artificial Intelligence enhances robotics by enabling real-time perception and decision-making in unstructured environments where unpredictability and variability are high. Machine learning algorithms process sensor data to recognize objects, navigate obstacles, and adapt behaviors without pre-programmed instructions, improving operational efficiency. In structured environments, AI optimizes tasks through precise control and repetitive action learning, reducing errors and increasing productivity.
Human-Robot Interaction in Different Environments
Human-robot interaction (HRI) in structured environments benefits from predictable layouts and controlled variables, enabling robots to perform tasks with high precision and safety. In contrast, unstructured environments present dynamic and unpredictable elements, requiring advanced perception, adaptive algorithms, and real-time decision-making for effective HRI. Optimizing robot sensors, machine learning models, and collaborative frameworks is crucial to ensure seamless and intuitive interactions across both environment types.
Industrial Applications: Structured vs. Unstructured
Industrial robotics thrive in structured environments where repetitive tasks, predictable layouts, and controlled conditions allow precise automation and high efficiency. Unstructured environments challenge robots with variability and unpredictability, requiring advanced perception, adaptive algorithms, and machine learning to handle complex assembly or material handling tasks. Optimizing industrial automation depends on matching robotic systems to environment characteristics, leveraging structured settings for cost-effective production and employing flexible robots for dynamic, unstructured scenarios.
Future Trends in Environmental Adaptability for Robots
Future trends in environmental adaptability for robots emphasize advanced machine learning algorithms and sensor fusion techniques to navigate increasingly complex structured and unstructured environments. Developments in real-time data processing and autonomous decision-making enhance robotic flexibility, enabling seamless operation across dynamic industrial settings and unpredictable outdoor terrains. Innovations in tactile sensing and contextual awareness are driving improvements in robot-environment interaction, expanding applications in healthcare, agriculture, and disaster response.
Choosing the Right Robotics Approach for Your Environment
Selecting the appropriate robotics approach depends heavily on whether the environment is structured or unstructured. Structured environments, such as manufacturing floors with predictable layouts, benefit from fixed automation and pre-programmed robots that excel in repetitive, precise tasks. Unstructured environments, like warehouses or outdoor settings, require adaptive robots equipped with advanced sensors and machine learning algorithms to navigate variability and uncertainty effectively.
structured environment vs unstructured environment Infographic