Hard coding in robotics involves programming explicit instructions for every possible scenario, ensuring predictable and precise actions but limiting adaptability to unforeseen conditions. Learning-based control leverages data-driven algorithms that allow robots to improve performance through experience, enhancing flexibility and handling complex, dynamic environments. Balancing these approaches can optimize robot efficiency by combining reliability with the ability to generalize from new inputs.
Table of Comparison
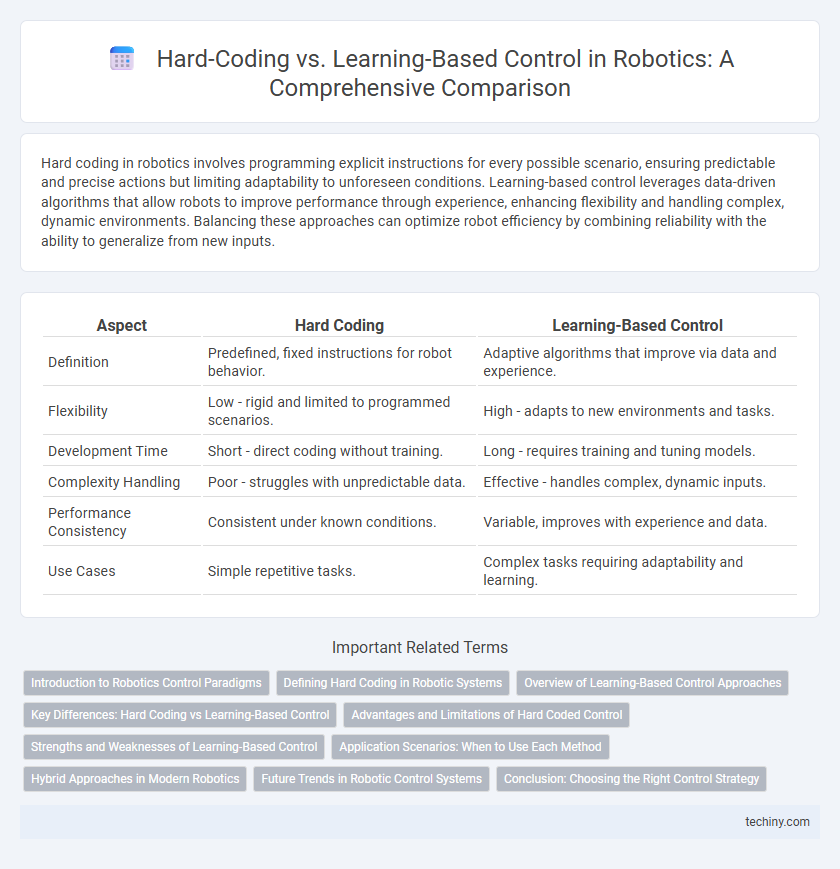
| Aspect | Hard Coding | Learning-Based Control |
|---|---|---|
| Definition | Predefined, fixed instructions for robot behavior. | Adaptive algorithms that improve via data and experience. |
| Flexibility | Low - rigid and limited to programmed scenarios. | High - adapts to new environments and tasks. |
| Development Time | Short - direct coding without training. | Long - requires training and tuning models. |
| Complexity Handling | Poor - struggles with unpredictable data. | Effective - handles complex, dynamic inputs. |
| Performance Consistency | Consistent under known conditions. | Variable, improves with experience and data. |
| Use Cases | Simple repetitive tasks. | Complex tasks requiring adaptability and learning. |
Introduction to Robotics Control Paradigms
Hard coding in robotics control involves pre-programmed, deterministic instructions that dictate specific robot behaviors, ensuring predictable and repeatable performance in structured environments. Learning-based control utilizes algorithms, such as reinforcement learning or neural networks, to enable robots to adapt and optimize their actions through interaction with dynamic environments. This paradigm shift enhances flexibility and robustness, allowing robots to handle complex, uncertain tasks beyond the limitations of fixed programming.
Defining Hard Coding in Robotic Systems
Hard coding in robotic systems refers to programming fixed, predefined instructions that dictate robot behavior without adaptation or real-time decision-making capabilities. This approach relies on explicit algorithms and control logic where every possible scenario must be anticipated and manually encoded by engineers. Hard-coded control ensures predictable robot performance but lacks flexibility and is less effective in dynamic or uncertain environments compared to learning-based control methods.
Overview of Learning-Based Control Approaches
Learning-based control approaches in robotics leverage data-driven algorithms such as reinforcement learning, neural networks, and model predictive control to adapt to complex, dynamic environments. These methods enable robots to improve performance through experience, reducing reliance on pre-programmed rules typical of hard coding. By continuously updating control policies based on sensor feedback, learning-based control enhances flexibility and robustness in robotic systems.
Key Differences: Hard Coding vs Learning-Based Control
Hard coding in robotics involves explicitly programming predefined rules and behaviors, ensuring predictable actions but limiting adaptability. Learning-based control utilizes algorithms, such as reinforcement learning or neural networks, to enable robots to adapt and improve performance through data-driven experiences. Key differences include flexibility, with learning-based methods offering greater adaptability to dynamic environments, whereas hard coding provides consistency and interpretability.
Advantages and Limitations of Hard Coded Control
Hard coded control in robotics offers precise, predictable performance through predefined rules, ensuring reliability in static environments and low-complexity tasks. It facilitates faster execution with minimal computational resources, making it suitable for real-time applications where consistent behavior is crucial. However, its limitations include poor adaptability to dynamic or unstructured environments and difficulty in scaling to complex tasks requiring autonomous decision-making.
Strengths and Weaknesses of Learning-Based Control
Learning-based control excels in adaptability, enabling robots to improve performance through experience and handle complex, dynamic environments without explicit programming. Its major weakness lies in the requirement for large datasets and extensive training time, which can limit real-time responsiveness and increase computational demands. Moreover, the lack of interpretability in some learning algorithms may pose challenges in safety-critical applications where predictable behavior is essential.
Application Scenarios: When to Use Each Method
Hard coding in robotics control excels in structured environments with predictable tasks, such as assembly lines and repetitive manufacturing processes, where precision and reliability are paramount. Learning-based control adapts effectively to dynamic, unpredictable scenarios like autonomous navigation or complex manipulation, where the robot must generalize from experience and sensor data. Selecting between these methods depends on the trade-off between stability in fixed conditions and flexibility in evolving contexts.
Hybrid Approaches in Modern Robotics
Hybrid approaches in modern robotics integrate hard coding with learning-based control to leverage the reliability of predefined algorithms and the adaptability of data-driven models. These systems combine precise, rule-based commands for predictable tasks with reinforcement learning or neural networks to handle dynamic environments and unforeseen scenarios. By merging deterministic control with machine learning, hybrid methods enhance robot performance, robustness, and flexibility across diverse applications.
Future Trends in Robotic Control Systems
Hard coding in robotic control systems offers precise, rule-based operation ideal for predictable tasks but lacks adaptability to dynamic environments. Learning-based control leverages machine learning algorithms to enable robots to improve performance through experience, enhancing flexibility and autonomy. Future trends indicate a hybrid approach combining deterministic hard coding with adaptive learning models to optimize efficiency, robustness, and real-time decision-making in increasingly complex robotic applications.
Conclusion: Choosing the Right Control Strategy
Selecting the appropriate control strategy in robotics depends on task complexity and environmental variability, with hard coding offering precise control in predictable, static settings while learning-based control excels in dynamic, uncertain environments through adaptability. Integrating both approaches can enhance performance by combining the reliability of predefined commands and the flexibility of machine learning algorithms. Evaluating system requirements, computational resources, and desired autonomy levels is critical for optimizing robotic control solutions.
Hard coding vs Learning-based control Infographic