Handover in robotics involves seamless, coordinated transfer of objects between a robot and a human, prioritizing safety and intuitive interaction. Pick-and-place tasks focus on robotic arms autonomously grasping, moving, and positioning items within a workspace, optimizing speed and precision. Both methods enhance automation but serve different operational needs based on interaction dynamics and task complexity.
Table of Comparison
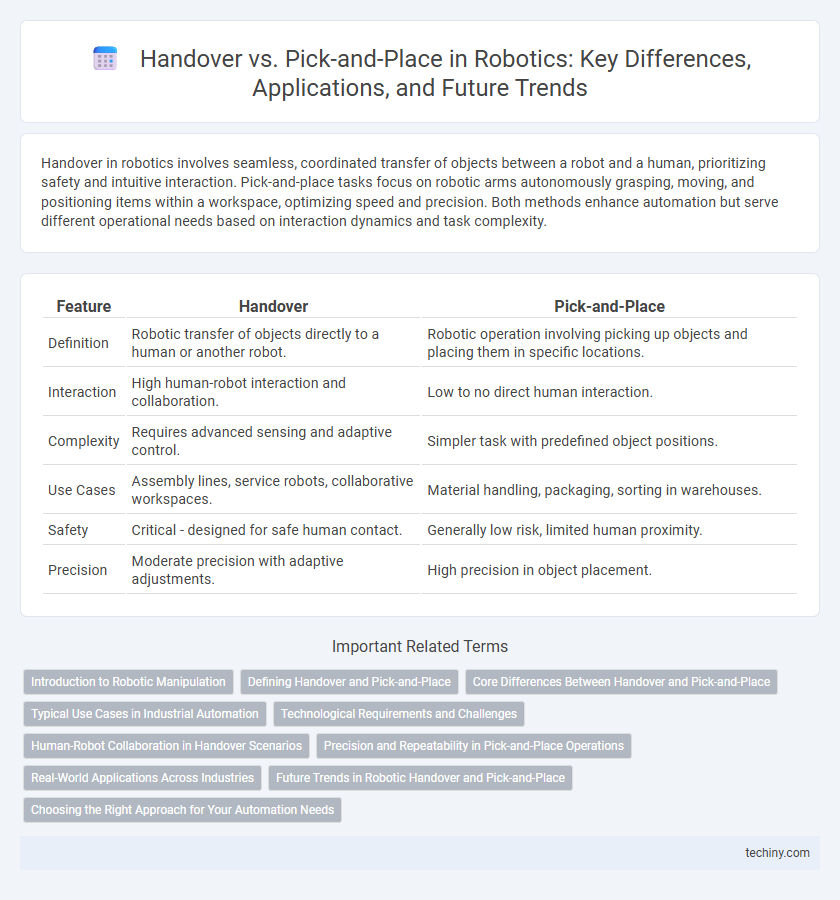
| Feature | Handover | Pick-and-Place |
|---|---|---|
| Definition | Robotic transfer of objects directly to a human or another robot. | Robotic operation involving picking up objects and placing them in specific locations. |
| Interaction | High human-robot interaction and collaboration. | Low to no direct human interaction. |
| Complexity | Requires advanced sensing and adaptive control. | Simpler task with predefined object positions. |
| Use Cases | Assembly lines, service robots, collaborative workspaces. | Material handling, packaging, sorting in warehouses. |
| Safety | Critical - designed for safe human contact. | Generally low risk, limited human proximity. |
| Precision | Moderate precision with adaptive adjustments. | High precision in object placement. |
Introduction to Robotic Manipulation
Robotic manipulation involves controlling robotic arms to interact with objects, where handover and pick-and-place are key tasks defining different interaction complexities. Handover requires the robot to seamlessly transfer objects to humans or other robots, emphasizing coordination, safety, and timing, whereas pick-and-place focuses on the precise grasping and relocating of items within a workspace. Understanding these tasks enhances robot design for applications in manufacturing, logistics, and service robotics, improving efficiency and adaptability.
Defining Handover and Pick-and-Place
Handover in robotics refers to the seamless transfer of an object from a robot to a human or another robot, emphasizing coordination, timing, and safety during the exchange. Pick-and-place involves the robot autonomously gripping an object, lifting it from one location, and accurately positioning it in another, focusing on precision and spatial manipulation. Both tasks require advanced perception and control algorithms, but handover adds complexity with human-robot interaction dynamics.
Core Differences Between Handover and Pick-and-Place
Handover in robotics involves the seamless transfer of objects between a robot and a human or another robot, emphasizing smooth coordination and timing to ensure safety and efficiency. Pick-and-place tasks focus on the robot autonomously grasping an object from one location and positioning it accurately at another, highlighting precision and path planning. The core difference lies in handover's interactive nature requiring adaptive control and communication, while pick-and-place centers on programmed motion execution without real-time human interaction.
Typical Use Cases in Industrial Automation
Handover tasks in industrial automation are commonly employed for collaborative robot systems where seamless human-robot interaction is essential, such as assembly lines requiring precise part transfers between operators and robots. Pick-and-place operations dominate high-speed sorting, packaging, and material handling environments, optimizing efficiency through robotic arms programmed to rapidly move components between conveyor belts and processing stations. Both techniques streamline manufacturing workflows, with handover excelling in tasks demanding dexterity and safety, while pick-and-place suits repetitive, high-volume throughput.
Technological Requirements and Challenges
Handover tasks in robotics demand advanced sensory perception and precise human-robot interaction capabilities to ensure safe and seamless object transfer, requiring sophisticated force feedback and motion prediction algorithms. Pick-and-place operations rely heavily on accurate object recognition, robust gripper design, and efficient trajectory planning to optimize speed and reliability in repetitive tasks. Both domains face challenges in adapting to diverse object shapes, dynamic environments, and real-time decision-making under uncertainty.
Human-Robot Collaboration in Handover Scenarios
Handover in human-robot collaboration involves seamless transfer of objects between humans and robots, requiring precise motion planning and real-time grasp adjustment to ensure safety and efficiency. Unlike pick-and-place tasks that primarily focus on autonomous object manipulation within predefined environments, handover scenarios demand sophisticated sensors and intent recognition to predict human actions and adapt robot behavior accordingly. Effective human-robot handover enhances collaborative workflow by reducing task completion time and minimizing cognitive load on human operators through intuitive interaction design.
Precision and Repeatability in Pick-and-Place Operations
Pick-and-place operations in robotics demand high precision and repeatability to ensure consistent object positioning, critical in assembly lines and packaging processes. Advanced sensors and vision systems enhance accuracy by continuously monitoring the robotic arm's trajectory and object location. Repeatability, often measured in micrometers, guarantees that each movement is identical, minimizing errors and improving overall production efficiency.
Real-World Applications Across Industries
Handover and pick-and-place robotic systems enhance efficiency in real-world applications such as manufacturing, healthcare, and logistics by automating material transfer and assembly tasks. Handover robots excel in collaborative environments by safely exchanging objects with human operators, improving workflow in automotive assembly and surgical assistance. Pick-and-place robots optimize high-speed sorting and packaging in warehouses and food processing, reducing downtime and increasing throughput.
Future Trends in Robotic Handover and Pick-and-Place
Future trends in robotic handover focus on enhancing human-robot collaboration through advanced sensor integration and AI-driven adaptability, enabling smoother, context-aware transfers. In pick-and-place operations, developments emphasize high-precision manipulation and increased speed via machine learning algorithms and modular gripper designs. The convergence of tactile feedback, real-time environment mapping, and autonomous decision-making drives the evolution of both handover and pick-and-place tasks in industrial automation.
Choosing the Right Approach for Your Automation Needs
Selecting between handover and pick-and-place methods depends on task complexity, speed requirements, and human-robot interaction levels. Handover excels in collaborative environments requiring smooth human-to-robot object transfers, while pick-and-place suits repetitive, high-precision sorting and assembly lines. Evaluating payload, workspace constraints, and integration with existing systems ensures optimal automation efficiency and safety.
Handover vs Pick-and-Place Infographic