PWM control adjusts motor speed by varying pulse width modulation signals, enabling precise velocity management in robotic applications. Servo control, on the other hand, provides accurate position and angle regulation by combining PWM with feedback mechanisms for enhanced precision. Choosing between PWM and servo control depends on the required balance between speed control and positional accuracy in robotic systems.
Table of Comparison
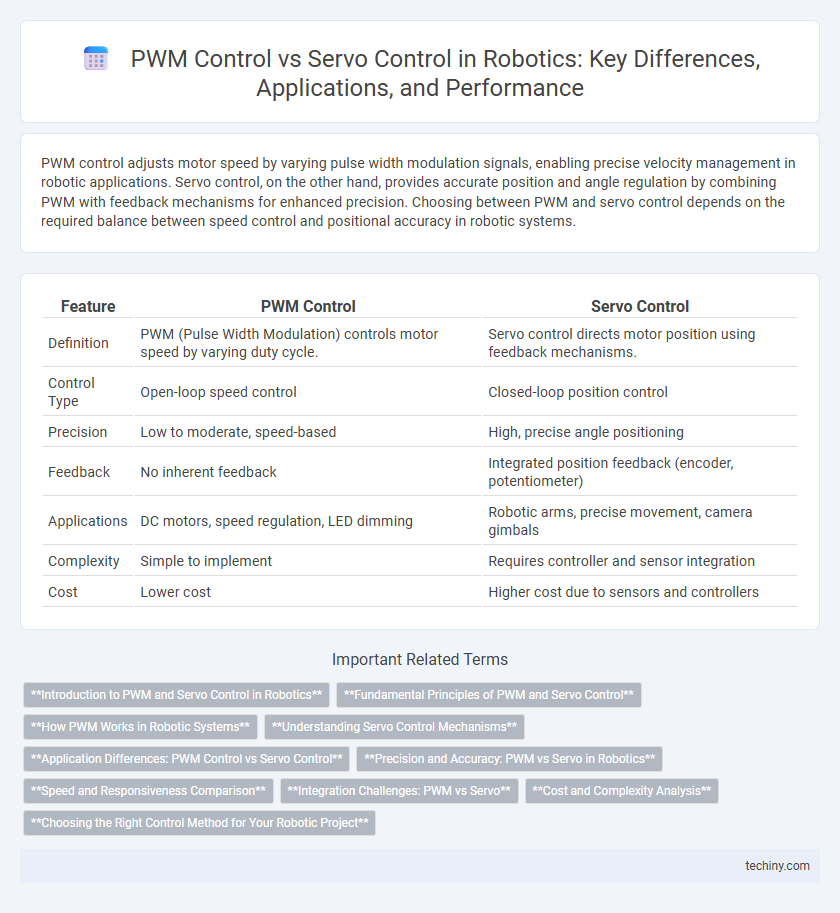
| Feature | PWM Control | Servo Control |
|---|---|---|
| Definition | PWM (Pulse Width Modulation) controls motor speed by varying duty cycle. | Servo control directs motor position using feedback mechanisms. |
| Control Type | Open-loop speed control | Closed-loop position control |
| Precision | Low to moderate, speed-based | High, precise angle positioning |
| Feedback | No inherent feedback | Integrated position feedback (encoder, potentiometer) |
| Applications | DC motors, speed regulation, LED dimming | Robotic arms, precise movement, camera gimbals |
| Complexity | Simple to implement | Requires controller and sensor integration |
| Cost | Lower cost | Higher cost due to sensors and controllers |
Introduction to PWM and Servo Control in Robotics
Pulse Width Modulation (PWM) control in robotics involves varying the duty cycle of a digital signal to regulate motor speed and torque with precision. Servo control integrates PWM signals with feedback mechanisms, enabling accurate position and velocity control of robotic joints and actuators. PWM provides efficient power management, while servo control ensures precise and responsive movement essential for complex robotic tasks.
Fundamental Principles of PWM and Servo Control
Pulse Width Modulation (PWM) controls robotic actuators by varying the duty cycle of a digital signal to regulate power delivery and motor speed, enabling precise energy modulation. Servo control integrates PWM signals with closed-loop feedback mechanisms, allowing accurate position and velocity adjustments through continuous error correction. Understanding these foundational principles enhances the design of responsive and efficient robotic control systems.
How PWM Works in Robotic Systems
Pulse Width Modulation (PWM) operates by varying the duty cycle of a digital signal to control the power delivered to robotic actuators. In robotic systems, this modulation adjusts motor speed or position precisely by switching the voltage on and off at high frequency, effectively encoding control signals for servo motors or DC motors. PWM efficiency in energy use and responsiveness makes it essential for fine-tuning motion control in robotics applications.
Understanding Servo Control Mechanisms
Servo control mechanisms utilize feedback systems incorporating potentiometers or encoders to precisely regulate motor position, speed, and torque, enabling accurate motion control in robotics applications. Unlike Pulse Width Modulation (PWM) control, which simply adjusts power to the motor, servo control continuously monitors output and adjusts input signals to maintain desired performance within tight tolerance levels. This closed-loop control system enhances precision, stability, and responsiveness, making it essential for robotic arms, camera gimbals, and autonomous navigation systems requiring exact positional accuracy.
Application Differences: PWM Control vs Servo Control
PWM control is widely used for managing the speed and direction of DC motors in robotics, offering precise voltage modulation to adjust motor performance. Servo control, on the other hand, provides accurate position feedback and control, making it ideal for tasks requiring precise angular positioning, such as robotic arms and joint articulation. The choice between PWM and servo control depends on whether the application prioritizes speed regulation or precise positional accuracy.
Precision and Accuracy: PWM vs Servo in Robotics
PWM control regulates motor speed through duty cycle modulation but often lacks fine precision due to variations in load and voltage. Servo control utilizes feedback loops incorporating position sensors to achieve high accuracy and repeatability in robotic movements. Precision in robotics is significantly enhanced with servo control as it maintains targeted positions even under dynamic conditions.
Speed and Responsiveness Comparison
PWM control offers high-speed switching capabilities but can exhibit slower responsiveness due to its reliance on duty cycle modulation for speed adjustments. Servo control provides precise and rapid responsiveness by using feedback mechanisms to adjust position and speed instantaneously. In robotics, servo control outperforms PWM in applications requiring quick, accurate movements, while PWM is more suited for consistent speed without rapid changes.
Integration Challenges: PWM vs Servo
PWM control offers simplicity and broad compatibility with various motor types but often requires precise calibration to minimize signal noise and ensure stable operation in robotics. Servo control systems provide built-in feedback mechanisms that enhance accuracy and ease of integration, yet they demand more complex communication protocols and higher computational resources. Addressing these integration challenges involves balancing the straightforward nature of PWM signals against the sophisticated feedback capabilities of servos to optimize robotic performance.
Cost and Complexity Analysis
PWM control offers a cost-effective solution with simpler hardware requirements compared to servo control, which involves more complex circuitry and higher expenses due to integrated feedback mechanisms. Servo control provides precise positioning and stability through closed-loop systems but demands advanced microcontrollers and sensors, increasing both development time and overall cost. For budget-sensitive robotics projects, PWM is preferred, while applications needing accuracy justify the investment in servo control despite its complexity.
Choosing the Right Control Method for Your Robotic Project
PWM control offers precise speed and torque regulation by varying pulse width, making it ideal for simple motors in robotic projects requiring continuous rotation. Servo control provides accurate position feedback and is essential for applications demanding precise angular positioning, such as robotic arms and articulated joints. Selecting the right method depends on the project's need for either continuous motor speed adjustment or exact positional accuracy in robotics.
PWM control vs Servo control Infographic