Distributed control in robotics enables individual agents or subsystems to operate autonomously, enhancing system robustness and flexibility by reducing reliance on a central controller. Hierarchical control, by contrast, organizes decision-making in a top-down structure that simplifies complex task management but can create bottlenecks and reduce adaptability. Balancing these approaches allows robotic systems to achieve efficient coordination while maintaining responsiveness in dynamic environments.
Table of Comparison
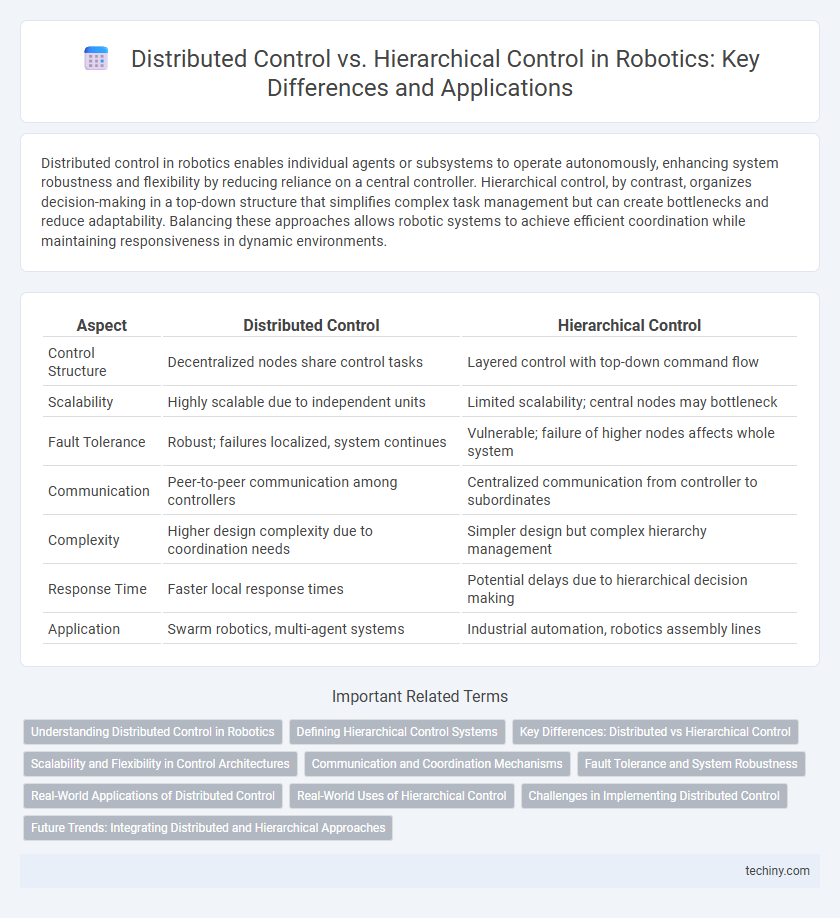
| Aspect | Distributed Control | Hierarchical Control |
|---|---|---|
| Control Structure | Decentralized nodes share control tasks | Layered control with top-down command flow |
| Scalability | Highly scalable due to independent units | Limited scalability; central nodes may bottleneck |
| Fault Tolerance | Robust; failures localized, system continues | Vulnerable; failure of higher nodes affects whole system |
| Communication | Peer-to-peer communication among controllers | Centralized communication from controller to subordinates |
| Complexity | Higher design complexity due to coordination needs | Simpler design but complex hierarchy management |
| Response Time | Faster local response times | Potential delays due to hierarchical decision making |
| Application | Swarm robotics, multi-agent systems | Industrial automation, robotics assembly lines |
Understanding Distributed Control in Robotics
Distributed control in robotics involves multiple autonomous controllers operating independently across a robotic system, enhancing flexibility and fault tolerance. This approach contrasts hierarchical control, where a central processor directs subordinates, often resulting in bottlenecks and reduced scalability. Implementing distributed control optimizes real-time decision-making and robustness in complex, dynamic environments.
Defining Hierarchical Control Systems
Hierarchical control systems in robotics organize control tasks into multiple levels, where high-level commands guide low-level execution for improved manageability and scalability. Each layer processes information and issues commands to subordinate layers, enabling complex decision-making while maintaining system modularity. This structure contrasts with distributed control by emphasizing a clear chain of command and centralized decision authority.
Key Differences: Distributed vs Hierarchical Control
Distributed control systems in robotics allocate decision-making across multiple autonomous agents, enhancing fault tolerance and scalability by enabling local processing and communication. Hierarchical control structures organize control tasks in a top-down manner, centralizing command flow which simplifies coordination but may introduce bottlenecks and single points of failure. Key differences include distributed control's robustness and flexibility versus hierarchical control's clarity in task prioritization and global oversight.
Scalability and Flexibility in Control Architectures
Distributed control architectures in robotics enable higher scalability by decentralizing decision-making processes across multiple nodes, allowing seamless integration of additional components without significant reconfiguration. Hierarchical control systems provide structured flexibility with clear command layers but often face limitations in scaling due to bottlenecks at higher control levels. Emphasizing distributed control enhances adaptability and fault tolerance, making it ideal for complex, large-scale robotic networks requiring dynamic reallocation of control resources.
Communication and Coordination Mechanisms
Distributed control systems in robotics rely on decentralized communication protocols, enabling multiple agents to share information locally and coordinate actions without a central authority, which enhances scalability and fault tolerance. Hierarchical control structures utilize top-down communication channels where commands flow from a central controller to subordinate units, ensuring organized coordination but potentially limiting responsiveness to dynamic changes. Effective communication in distributed control leverages peer-to-peer messaging and consensus algorithms, while hierarchical control depends on structured command hierarchies and feedback loops to maintain system stability.
Fault Tolerance and System Robustness
Distributed control systems in robotics enhance fault tolerance by decentralizing decision-making, allowing individual nodes to isolate and manage faults independently, which improves overall system robustness. Hierarchical control relies on a top-down approach, where faults at higher levels can propagate and impact subordinate components, potentially reducing system resilience. Implementing distributed architectures increases redundancy and enables dynamic reconfiguration, making robotic systems more resilient to unexpected failures and enhancing continuous operation.
Real-World Applications of Distributed Control
Distributed control systems enhance robotic efficiency by enabling multiple controllers to operate concurrently across various components, improving fault tolerance and scalability in manufacturing robots and autonomous vehicle networks. This architecture allows real-time data processing at the edge, reducing latency and increasing responsiveness in swarm robotics and smart grid management. Industrial automation and collaborative robot teams benefit significantly from distributed control, as it supports decentralized decision-making and flexible system adaptation to dynamic environments.
Real-World Uses of Hierarchical Control
Hierarchical control systems are widely implemented in industrial robotics for precise task management and efficient resource allocation. These systems enable layered decision-making, improving coordination in complex manufacturing processes such as automotive assembly lines. Real-world applications demonstrate enhanced scalability and fault tolerance compared to distributed control architectures.
Challenges in Implementing Distributed Control
Implementing distributed control in robotics faces challenges such as maintaining system stability and synchronization across multiple autonomous agents in real-time. Limited communication bandwidth and latency issues can disrupt coordination between decentralized nodes, leading to potential failures or delays in execution. Ensuring robust fault tolerance and seamless integration of local decision-making processes remains critical in complex robotic systems.
Future Trends: Integrating Distributed and Hierarchical Approaches
Future trends in robotics emphasize integrating distributed and hierarchical control to enhance system flexibility and scalability. This hybrid approach enables decentralized decision-making while maintaining coordinated oversight, improving adaptability in complex environments. Advances in multi-agent systems and AI-driven control algorithms are driving the convergence of these paradigms for more robust robotic architectures.
Distributed control vs hierarchical control Infographic