ROS offers a vast ecosystem with extensive community support and a flexible architecture ideal for rapid prototyping and complex robotic applications. YARP excels in modularity and real-time communication, particularly suited for projects requiring fine-grained control over hardware interfaces and low-latency data exchange. Both frameworks enable robot software development, but ROS is preferred for its scalability, while YARP stands out in scenarios needing precise, real-time system integration.
Table of Comparison
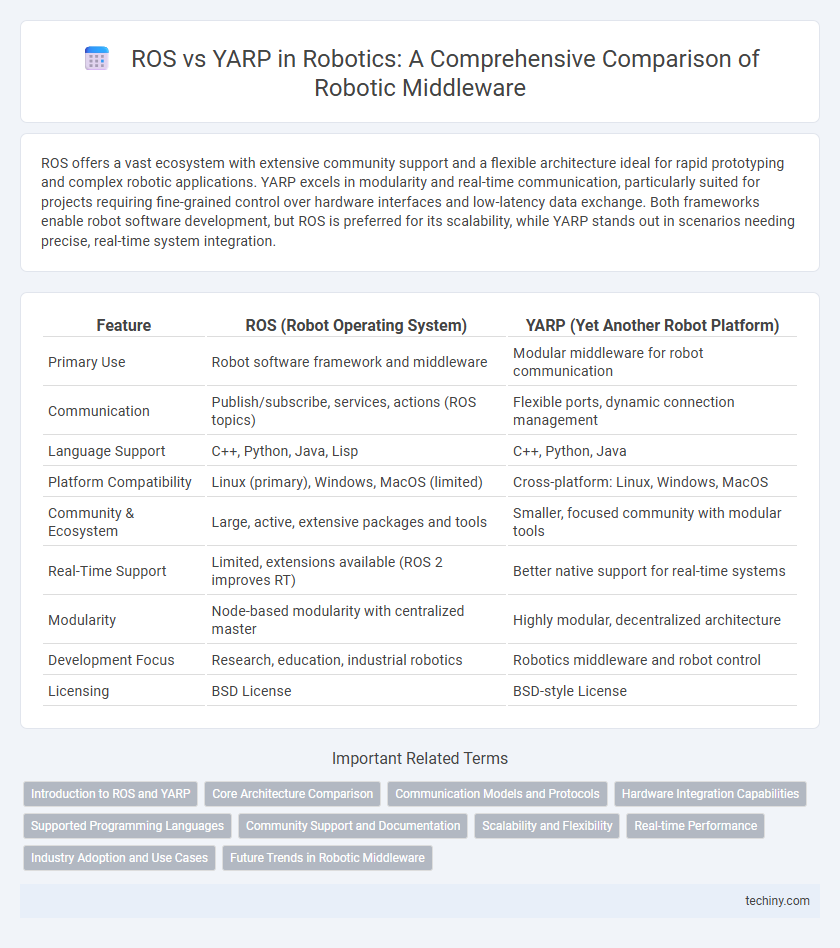
| Feature | ROS (Robot Operating System) | YARP (Yet Another Robot Platform) |
|---|---|---|
| Primary Use | Robot software framework and middleware | Modular middleware for robot communication |
| Communication | Publish/subscribe, services, actions (ROS topics) | Flexible ports, dynamic connection management |
| Language Support | C++, Python, Java, Lisp | C++, Python, Java |
| Platform Compatibility | Linux (primary), Windows, MacOS (limited) | Cross-platform: Linux, Windows, MacOS |
| Community & Ecosystem | Large, active, extensive packages and tools | Smaller, focused community with modular tools |
| Real-Time Support | Limited, extensions available (ROS 2 improves RT) | Better native support for real-time systems |
| Modularity | Node-based modularity with centralized master | Highly modular, decentralized architecture |
| Development Focus | Research, education, industrial robotics | Robotics middleware and robot control |
| Licensing | BSD License | BSD-style License |
Introduction to ROS and YARP
ROS (Robot Operating System) offers a modular framework for robot software development, emphasizing scalability, extensive libraries, and strong community support for complex robotic applications. YARP (Yet Another Robot Platform) focuses on flexible and efficient communication between distributed robotic modules, enabling real-time data exchange with low latency. Both frameworks facilitate robotic system integration but differ in their communication protocols and design philosophies.
Core Architecture Comparison
ROS (Robot Operating System) features a modular, message-passing architecture centered on nodes communicating via topics and services, enabling flexibility and scalability in robot software development. YARP (Yet Another Robot Platform) employs a more decentralized architecture based on ports and connections that emphasize real-time data streaming and dynamic reconfiguration for complex robotic systems. Core differences include ROS's reliance on a central master node for coordination versus YARP's peer-to-peer communication model that enhances robustness in distributed control.
Communication Models and Protocols
ROS (Robot Operating System) employs a publish-subscribe communication model using TCP/IP and UDP protocols optimized for scalability and real-time messaging. YARP (Yet Another Robot Platform) supports multiple communication protocols including TCP, UDP, and shared memory, enabling flexible point-to-point and broadcast messaging suited for modular robotic systems. The choice between ROS and YARP depends on the application's need for standardized topic-based messaging versus customizable, low-latency inter-process communication.
Hardware Integration Capabilities
ROS offers extensive hardware integration capabilities through a vast ecosystem of standardized drivers, supporting a wide range of sensors, actuators, and robotic platforms with real-time communication via ROS 2 DDS protocols. YARP provides modular and flexible hardware abstraction layers, prioritizing custom hardware interfacing with low-latency data transmission and decentralized control suited for complex robotic systems. Both frameworks facilitate hardware integration but differ in scalability and community support, with ROS benefiting from broader adoption and YARP excelling in adaptive middleware solutions.
Supported Programming Languages
ROS supports multiple programming languages including Python, C++, and recently, JavaScript through ROS2, enhancing flexibility for diverse robotics applications. YARP primarily supports C++ and Python, offering efficient interoperability and communication in robotic systems. Both frameworks facilitate multi-language programming but ROS provides broader native language support tailored for complex robotic software development.
Community Support and Documentation
ROS (Robot Operating System) offers an extensive community support network with numerous forums, tutorials, and regularly updated documentation that facilitate rapid development and troubleshooting. YARP (Yet Another Robot Platform) provides detailed documentation and a dedicated but smaller community, which ensures focused, expert assistance but may limit breadth of shared resources. The expansive ROS ecosystem and active developer base make it a preferred choice for collaborative projects requiring robust community interaction and continuous learning materials.
Scalability and Flexibility
ROS offers extensive scalability through its modular architecture and vast ecosystem, enabling seamless integration of numerous robotic components across diverse applications. YARP excels in flexibility by providing dynamic network connections and real-time communication capabilities, making it ideal for complex, distributed robotic systems. Both frameworks support multi-platform deployment but ROS's widespread adoption enhances community-driven scalability, while YARP's design emphasizes adaptability in heterogeneous environments.
Real-time Performance
ROS and YARP are prominent middleware frameworks in robotics, with YARP offering superior real-time performance due to its flexible communication protocols and lower latency capabilities. ROS, primarily designed for modularity and ease of use, relies on non-real-time communication methods that can introduce delays in time-critical applications. YARP's support for deterministic message passing and dynamic reconfiguration makes it more suitable for robotics systems requiring stringent real-time constraints.
Industry Adoption and Use Cases
ROS (Robot Operating System) dominates industry adoption with extensive support for autonomous vehicles, manufacturing automation, and service robots, driven by its vast open-source community and modular architecture. YARP (Yet Another Robot Platform) finds niche use in academic research and humanoid robotics, prized for real-time communication and flexible middleware integration. Major corporations prefer ROS for scalable production deployment, while YARP suits projects requiring low-latency control and custom middleware solutions.
Future Trends in Robotic Middleware
ROS (Robot Operating System) is expected to dominate future robotic middleware due to its extensive community support, modular architecture, and continuous integration of AI and machine learning capabilities. YARP (Yet Another Robot Platform) remains significant for real-time communication and flexibility in heterogeneous systems, particularly in research environments requiring low-latency data exchange. Emerging trends indicate a convergence towards hybrid middleware solutions combining ROS's scalability with YARP's real-time performance to meet the evolving demands of advanced robotic applications.
ROS vs YARP Infographic