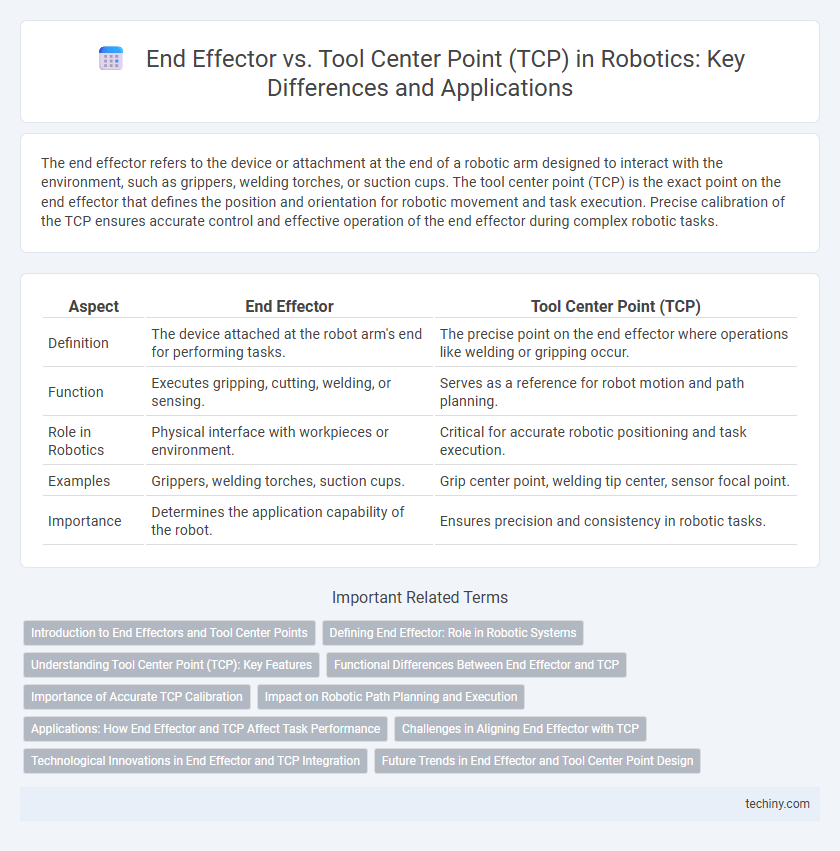
The end effector refers to the device or attachment at the end of a robotic arm designed to interact with the environment, such as grippers, welding torches, or suction cups. The tool center point (TCP) is the exact point on the end effector that defines the position and orientation for robotic movement and task execution. Precise calibration of the TCP ensures accurate control and effective operation of the end effector during complex robotic tasks.
Table of Comparison
| Aspect | End Effector | Tool Center Point (TCP) |
|---|---|---|
| Definition | The device attached at the robot arm's end for performing tasks. | The precise point on the end effector where operations like welding or gripping occur. |
| Function | Executes gripping, cutting, welding, or sensing. | Serves as a reference for robot motion and path planning. |
| Role in Robotics | Physical interface with workpieces or environment. | Critical for accurate robotic positioning and task execution. |
| Examples | Grippers, welding torches, suction cups. | Grip center point, welding tip center, sensor focal point. |
| Importance | Determines the application capability of the robot. | Ensures precision and consistency in robotic tasks. |
Introduction to End Effectors and Tool Center Points
End effectors are specialized devices attached to the end of a robotic arm designed to interact with the environment, such as grippers, welders, or sensors. The Tool Center Point (TCP) represents the precise coordinate location on the end effector that defines the point of interaction or contact during robotic operations. Understanding the relationship between the end effector and its TCP is essential for precise motion control, task execution, and accuracy in advanced robotic systems.
Defining End Effector: Role in Robotic Systems
The end effector serves as the specialized device attached to the robot's arm designed to interact with the environment, performing tasks such as gripping, welding, or painting. It directly influences the robot's functionality by enabling specific operations tailored to application requirements. Distinct from the tool center point (TCP), which defines a reference position for motion control, the end effector physically executes actions in robotic systems.
Understanding Tool Center Point (TCP): Key Features
Understanding the Tool Center Point (TCP) is crucial in robotics as it defines the exact position on the end effector where the robotic tool interacts with the environment. The TCP serves as the reference coordinate for motion planning, ensuring precise manipulation and accurate task execution. Accurate TCP calibration optimizes robot performance, enhances repeatability, and minimizes errors in complex automation processes.
Functional Differences Between End Effector and TCP
The end effector is the device attached to the robotic arm that interacts with the environment, such as grippers, welding guns, or sensors, defining the functional task of the robot. The tool center point (TCP) is a precise reference point on the end effector used by the robot's control system to calculate positions and orientations for accurate movement and operation. While the end effector performs the physical task, the TCP ensures precise control and coordination of the robot's actions in three-dimensional space.
Importance of Accurate TCP Calibration
Accurate Tool Center Point (TCP) calibration is critical in robotics to ensure precise end effector positioning and consistent task performance in automation processes. Misalignment in TCP calibration can lead to errors in trajectory planning, reduced accuracy, and increased wear on robotic components, compromising overall system efficiency. Proper calibration enables the robot controller to correctly interpret spatial coordinates, enhancing repeatability and quality in applications such as welding, assembly, and material handling.
Impact on Robotic Path Planning and Execution
End effectors and Tool Center Points (TCP) are critical in robotic path planning and execution, as the end effector defines the robot's interaction with the environment while the TCP serves as the precise positional reference for motion control. Accurate TCP calibration ensures optimal path accuracy, minimizing deviations and collisions during complex trajectories by aligning tool movements with programmed waypoints. Variations in end effector geometry directly influence TCP calculation, affecting motion precision, cycle time, and overall robotic system efficiency in automated tasks.
Applications: How End Effector and TCP Affect Task Performance
End effectors determine the robot's ability to interact with objects by providing specific gripping, cutting, or welding functionalities essential for various applications. The tool center point (TCP) defines the exact position where the end effector applies force or manipulation, directly influencing precision in tasks such as assembly or material handling. Accurate calibration of both end effector and TCP enhances task performance by improving accuracy, repeatability, and operational efficiency in automated processes.
Challenges in Aligning End Effector with TCP
Aligning the end effector with the tool center point (TCP) presents significant challenges due to variations in robot kinematics and payload shifts, which affect precision and repeatability. Calibration errors and mechanical deflections introduce discrepancies between the actual end effector position and the intended TCP, leading to reduced accuracy in tasks such as welding or pick-and-place operations. Advanced sensor integration and real-time compensation algorithms are essential to mitigate these alignment issues and ensure consistent robotic performance.
Technological Innovations in End Effector and TCP Integration
Technological innovations in end effector design have advanced the precision and versatility of tool center point (TCP) integration, enabling robots to perform complex tasks with higher accuracy and adaptability. Modern end effectors feature modular components and sensor integration that dynamically adjust TCP positioning in real time, optimizing performance for diverse applications such as assembly, welding, and material handling. Enhanced TCP calibration algorithms and machine learning techniques further refine spatial accuracy, reducing errors and increasing efficiency across robotic operations.
Future Trends in End Effector and Tool Center Point Design
Future trends in end effector and tool center point (TCP) design emphasize enhanced adaptability and precision through advanced sensor integration and machine learning algorithms. Emerging materials such as lightweight composites and smart polymers enable customizable and energy-efficient grippers tailored for specific tasks in dynamic environments. The convergence of AI-driven control systems and real-time feedback loops optimizes TCP calibration, resulting in improved accuracy and operational efficiency across diverse robotic applications.
End effector vs Tool center point Infographic