Supervisory control in robotics involves overseeing and guiding robotic systems from a higher-level perspective, allowing for efficient management of complex tasks and multiple robots simultaneously. Direct control requires operators to manipulate robots in real-time, providing precise, hands-on command but often limiting scale and responsiveness. Selecting between supervisory and direct control depends on the application's complexity, required automation level, and operator expertise.
Table of Comparison
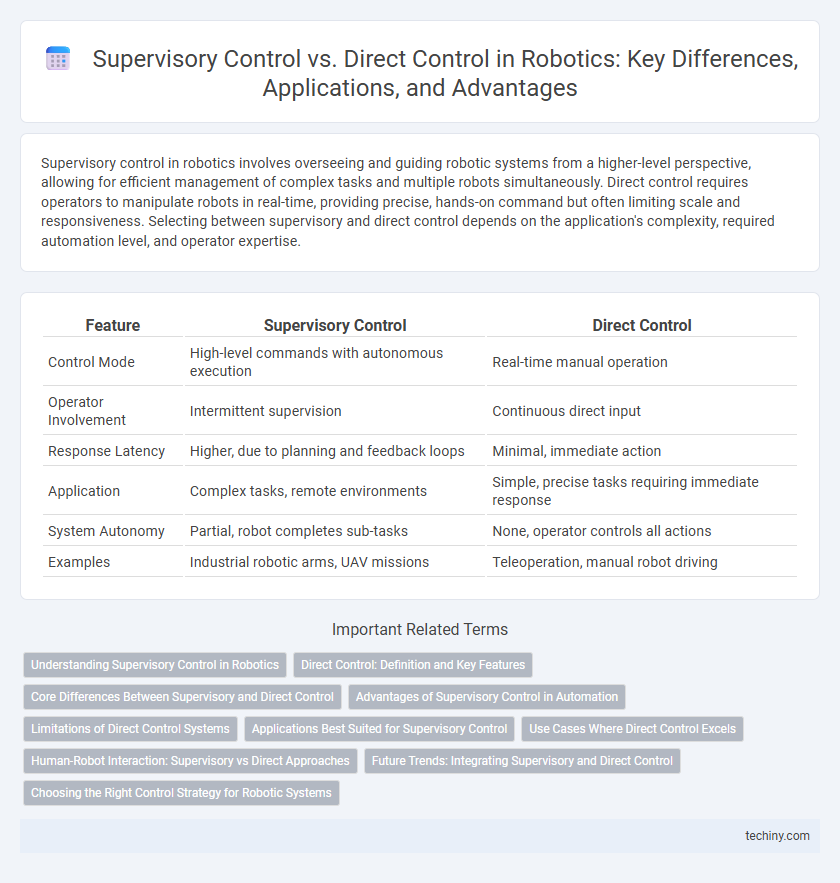
| Feature | Supervisory Control | Direct Control |
|---|---|---|
| Control Mode | High-level commands with autonomous execution | Real-time manual operation |
| Operator Involvement | Intermittent supervision | Continuous direct input |
| Response Latency | Higher, due to planning and feedback loops | Minimal, immediate action |
| Application | Complex tasks, remote environments | Simple, precise tasks requiring immediate response |
| System Autonomy | Partial, robot completes sub-tasks | None, operator controls all actions |
| Examples | Industrial robotic arms, UAV missions | Teleoperation, manual robot driving |
Understanding Supervisory Control in Robotics
Supervisory control in robotics involves a human operator overseeing and managing robot tasks through high-level commands rather than continuous direct manipulation, enhancing efficiency in complex environments. This control strategy enables autonomous execution of subtasks by robots, reducing operator workload and improving response times in dynamic scenarios. Understanding supervisory control is crucial for optimizing human-robot interaction and ensuring safe, scalable operation in industrial automation and remote applications.
Direct Control: Definition and Key Features
Direct control in robotics refers to the immediate manipulation of a robot's movements and actions through manual input devices such as joysticks, buttons, or touchscreens, enabling real-time responsiveness and operator precision. This control method features direct feedback loops, minimal latency, and intuitive interfaces that allow users to instantly influence robotic systems without intermediate decision-making processes. Key features include straightforward command execution, enhanced situational awareness for the operator, and suitability for tasks requiring fine motor skills and dynamic adjustments.
Core Differences Between Supervisory and Direct Control
Supervisory control allows operators to oversee multiple robots simultaneously through high-level commands, optimizing task allocation and reducing cognitive load, whereas direct control requires real-time manual manipulation of a robot's actions. Supervisory systems utilize autonomy and decision-making algorithms to execute complex behaviors, contrasting with direct control's reliance on continuous human input for precise movements. The core difference lies in the balance between human control and automated processes, impacting scalability, efficiency, and operator workload in robotic applications.
Advantages of Supervisory Control in Automation
Supervisory control in automation offers enhanced efficiency by enabling operators to oversee multiple robots simultaneously, reducing the need for constant manual input and minimizing human error. This approach facilitates real-time decision-making through intelligent monitoring systems, increasing operational flexibility and reliability across complex tasks. It also supports scalability and integration with advanced AI algorithms, optimizing overall productivity and system responsiveness.
Limitations of Direct Control Systems
Direct control systems in robotics face significant limitations including restricted operator scalability, as the human must continuously manage every robot action in real-time, leading to increased cognitive load and fatigue. These systems are also constrained by limited responsiveness in complex or dynamic environments, where manual intervention cannot match the speed or precision of autonomous decision-making. Furthermore, direct control often lacks adaptability and error recovery capabilities, reducing operational efficiency and increasing vulnerability to unexpected system failures.
Applications Best Suited for Supervisory Control
Supervisory control excels in complex environments such as autonomous vehicles, space exploration, and industrial automation where real-time decision-making requires managing multiple subsystems simultaneously. It is ideal for applications demanding high-level oversight with intermittent human intervention, enabling efficient task delegation and system monitoring. This control method enhances safety and reliability in hazardous or remote operations by minimizing the need for continuous manual input.
Use Cases Where Direct Control Excels
Direct control excels in use cases requiring real-time responsiveness and fine motor skill manipulation, such as surgical robotics or drone piloting in complex environments. It enables operators to immediately adjust commands based on sensory feedback, ensuring precise and dynamic interaction with the robot. Tasks demanding split-second decision-making and continuous human intervention benefit significantly from direct control systems.
Human-Robot Interaction: Supervisory vs Direct Approaches
Supervisory control in human-robot interaction allows operators to manage multiple robots by issuing high-level commands, enhancing efficiency in complex tasks and reducing cognitive load. Direct control requires continuous human input for real-time robot manipulation, offering precise control but increasing operator fatigue and limiting scalability. The choice between supervisory and direct control depends on task complexity, operator expertise, and the need for responsiveness versus autonomy in robotic systems.
Future Trends: Integrating Supervisory and Direct Control
Future trends in robotics emphasize the seamless integration of supervisory control and direct control to enhance flexibility and efficiency in autonomous systems. Advanced AI algorithms and real-time data processing enable robots to switch dynamically between high-level decision-making and low-level manipulation tasks, optimizing performance in complex environments. This hybrid control approach supports adaptive learning, improved human-robot collaboration, and scalable deployment across industries such as manufacturing, healthcare, and logistics.
Choosing the Right Control Strategy for Robotic Systems
Supervisory control in robotic systems enables high-level task management by allowing operators to monitor and adjust robot behavior without micromanagement, which is essential for complex or dynamic environments requiring flexibility. Direct control provides precise, real-time manipulation of robotic actuators, ideal for tasks demanding immediate responsiveness and fine motor skills, such as in surgical robots or industrial automation. Selecting the appropriate control strategy depends on factors like task complexity, operator expertise, environmental variability, and the required balance between autonomy and user input to optimize performance and safety.
Supervisory control vs Direct control Infographic