Dead reckoning in robotics estimates position based on movement data like wheel rotations and direction changes but can accumulate errors over time. Landmark navigation uses environmental features or markers to correct the robot's location, reducing drift and improving accuracy. Combining both methods enhances autonomous navigation by balancing continuous position tracking with periodic reference updates.
Table of Comparison
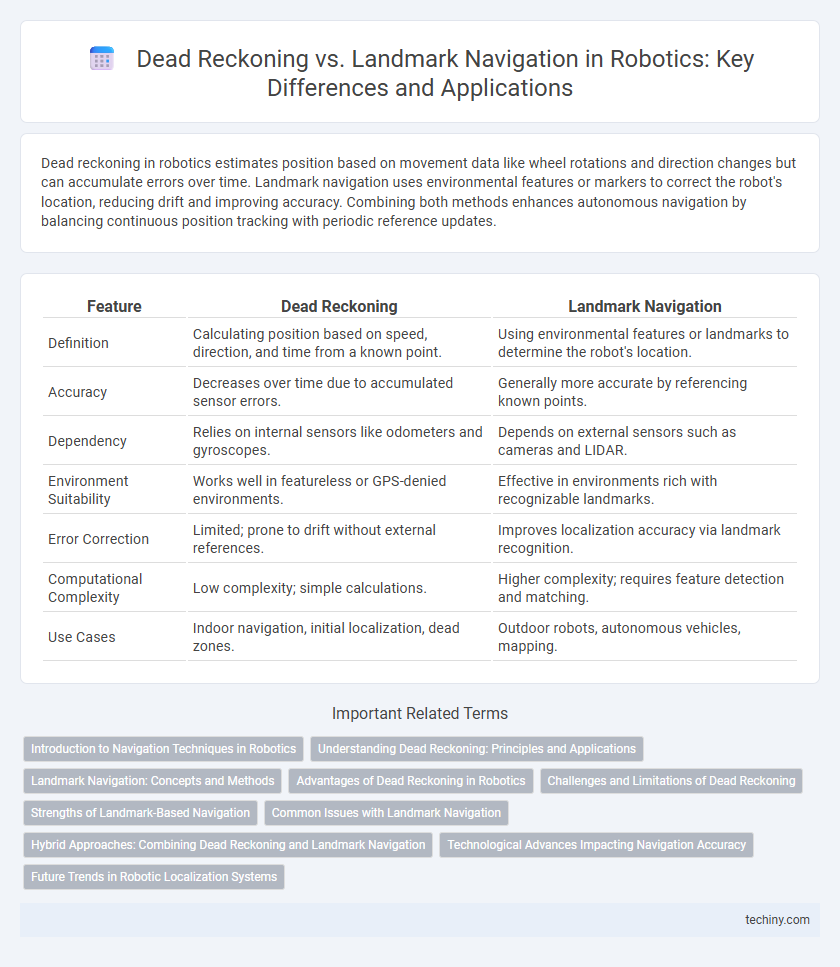
| Feature | Dead Reckoning | Landmark Navigation |
|---|---|---|
| Definition | Calculating position based on speed, direction, and time from a known point. | Using environmental features or landmarks to determine the robot's location. |
| Accuracy | Decreases over time due to accumulated sensor errors. | Generally more accurate by referencing known points. |
| Dependency | Relies on internal sensors like odometers and gyroscopes. | Depends on external sensors such as cameras and LIDAR. |
| Environment Suitability | Works well in featureless or GPS-denied environments. | Effective in environments rich with recognizable landmarks. |
| Error Correction | Limited; prone to drift without external references. | Improves localization accuracy via landmark recognition. |
| Computational Complexity | Low complexity; simple calculations. | Higher complexity; requires feature detection and matching. |
| Use Cases | Indoor navigation, initial localization, dead zones. | Outdoor robots, autonomous vehicles, mapping. |
Introduction to Navigation Techniques in Robotics
Dead reckoning in robotics estimates a robot's position by calculating its current location based on a previously known position, velocity, and heading, though it is prone to cumulative errors over time. Landmark navigation relies on identifying and using fixed environmental features or markers to correct positional estimates, enhancing overall accuracy. Combining dead reckoning with landmark navigation optimizes autonomous robot navigation in complex and dynamic environments.
Understanding Dead Reckoning: Principles and Applications
Dead reckoning in robotics involves estimating a robot's current position by continuously updating its previous location using data from motion sensors like wheel encoders and inertial measurement units (IMUs). This technique is highly dependent on accurate sensor readings but can accumulate significant errors over time due to drift and slippage. Dead reckoning is commonly applied in environments lacking distinct landmarks, providing real-time navigation support where GPS or visual cues are unavailable or unreliable.
Landmark Navigation: Concepts and Methods
Landmark navigation in robotics relies on identifying and using distinct environmental features to determine a robot's position and orientation. Techniques such as visual recognition, feature extraction, and probabilistic mapping enhance accuracy and adaptability in dynamic or GPS-denied environments. This method improves localization by continuously matching sensor data with known landmarks, reducing cumulative errors inherent in dead reckoning.
Advantages of Dead Reckoning in Robotics
Dead reckoning in robotics offers the advantage of continuous position estimation without reliance on external references, making it highly effective in GPS-denied or indoor environments. It enables robots to maintain real-time navigation using internal sensors such as wheel encoders and inertial measurement units, ensuring autonomy in complex or dynamic settings. The method's simplicity and low computational demand allow for efficient path planning and obstacle avoidance even in communication-limited scenarios.
Challenges and Limitations of Dead Reckoning
Dead reckoning in robotics faces significant challenges due to cumulative errors from sensor inaccuracies and wheel slippage, which cause position estimates to drift over time. Environmental factors like uneven terrain further degrade dead reckoning accuracy, limiting its reliability for long-distance navigation. Without external reference points, dead reckoning cannot correct these errors, making it less effective compared to landmark navigation methods that use environmental features for real-time position correction.
Strengths of Landmark-Based Navigation
Landmark-based navigation excels at providing robots with precise localization by using distinctive environmental features, reducing accumulated errors common in dead reckoning. Robots can adapt dynamically to changes by continuously referencing landmarks, enhancing robustness and accuracy in complex or GPS-denied environments. This method also facilitates long-term navigation stability as it mitigates drift caused by sensor inaccuracies inherent in dead reckoning systems.
Common Issues with Landmark Navigation
Landmark navigation in robotics often faces challenges such as environmental variability, where changes in lighting, weather, or obstacles can obscure or alter recognized landmarks, leading to inaccurate localization. Sensor noise and limited field of view further complicate landmark detection, causing intermittent recognition and errors in position estimation. Additionally, ambiguous or repetitive landmarks can confuse algorithms, resulting in navigation failures or increased computational overhead to resolve uncertainties.
Hybrid Approaches: Combining Dead Reckoning and Landmark Navigation
Hybrid approaches in robotics combine dead reckoning with landmark navigation to enhance localization accuracy and reliability. By integrating continuous motion estimation from dead reckoning with intermittent corrections based on distinct environmental features, robots mitigate drift errors inherent in dead reckoning alone. This fusion supports robust autonomous navigation in GPS-denied or dynamic environments by leveraging complementary sensor data and real-time environmental mapping.
Technological Advances Impacting Navigation Accuracy
Dead reckoning navigation relies on internal sensors such as accelerometers and gyroscopes to estimate a robot's position, but it often accumulates error over time due to sensor drift. Landmark navigation uses external references like visual markers or GPS signals, enhancing positional accuracy by correcting drift through environmental cues. Advances in sensor fusion algorithms and machine learning have significantly improved the integration of dead reckoning and landmark data, resulting in more reliable and precise robotic navigation systems.
Future Trends in Robotic Localization Systems
Future trends in robotic localization systems emphasize integrating dead reckoning with landmark navigation to enhance accuracy and reliability in dynamic environments. Advanced sensor fusion techniques combining IMU data, visual odometry, and SLAM algorithms enable robots to overcome individual method limitations. Emerging AI-driven models will optimize real-time map updates and error corrections, paving the way for autonomous systems with improved navigation precision and adaptability.
Dead reckoning vs landmark navigation Infographic