Tactile sensors measure surface contact properties such as pressure distribution and texture, enabling robots to perceive touch with high spatial resolution. Force sensors detect overall magnitude and direction of forces applied to the robot, providing critical data for dynamic interaction and manipulation tasks. Combining both sensors enhances robotic precision and adaptability in complex environments.
Table of Comparison
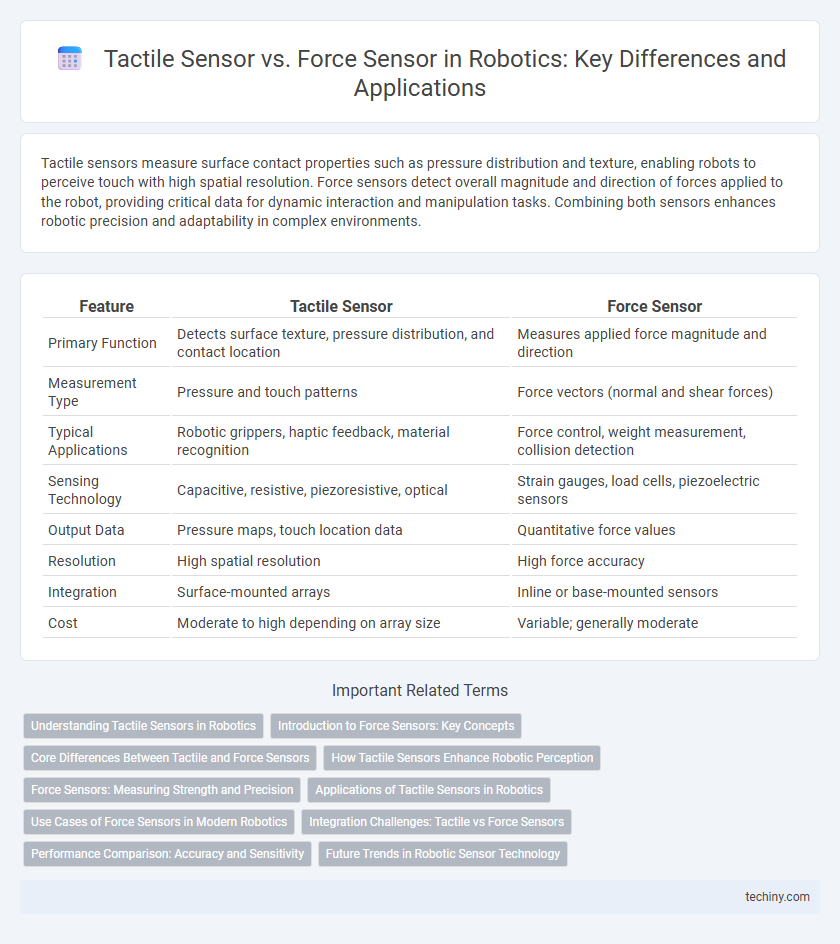
| Feature | Tactile Sensor | Force Sensor |
|---|---|---|
| Primary Function | Detects surface texture, pressure distribution, and contact location | Measures applied force magnitude and direction |
| Measurement Type | Pressure and touch patterns | Force vectors (normal and shear forces) |
| Typical Applications | Robotic grippers, haptic feedback, material recognition | Force control, weight measurement, collision detection |
| Sensing Technology | Capacitive, resistive, piezoresistive, optical | Strain gauges, load cells, piezoelectric sensors |
| Output Data | Pressure maps, touch location data | Quantitative force values |
| Resolution | High spatial resolution | High force accuracy |
| Integration | Surface-mounted arrays | Inline or base-mounted sensors |
| Cost | Moderate to high depending on array size | Variable; generally moderate |
Understanding Tactile Sensors in Robotics
Tactile sensors in robotics detect surface texture, pressure distribution, and vibration, enabling robots to interpret object properties through touch. Unlike force sensors that measure the magnitude and direction of applied forces, tactile sensors provide spatially rich, localized feedback crucial for delicate manipulation and object recognition. Advances in flexible materials and microfabrication have significantly enhanced tactile sensor sensitivity and resolution, improving robotic dexterity in complex environments.
Introduction to Force Sensors: Key Concepts
Force sensors measure the magnitude and direction of physical forces applied to a robotic system, enabling precise interaction with the environment. They convert mechanical force into electrical signals for real-time feedback and control, essential in applications such as robotic gripping, balance, and assembly. Key concepts include force range, sensitivity, linearity, and hysteresis, which determine sensor accuracy and reliability in dynamic tasks.
Core Differences Between Tactile and Force Sensors
Tactile sensors measure surface properties such as texture, shape, and pressure distribution, enabling robots to perceive contact details and manipulate objects with precision. Force sensors quantify the magnitude and direction of forces exerted on a robotic system, providing essential feedback for tasks requiring strength control and stability. The core difference lies in tactile sensors capturing spatial contact information while force sensors focus on overall force metrics applied to the robot.
How Tactile Sensors Enhance Robotic Perception
Tactile sensors enhance robotic perception by providing detailed surface texture, shape, and pressure distribution data, enabling robots to perform delicate manipulation tasks with precision. Unlike force sensors, which measure overall force magnitude and direction, tactile sensors detect localized contact information critical for object identification and slip detection. This rich sensory input allows robotic systems to adapt interactions dynamically, improving grasp stability and environmental understanding.
Force Sensors: Measuring Strength and Precision
Force sensors provide accurate measurements of applied strength and torque, making them essential for robotic manipulation and interaction tasks. These sensors detect the magnitude and direction of forces, enabling robots to perform precise gripping, assembly, and force-controlled operations. High-resolution force sensing improves robotic adaptability in complex environments, enhancing overall performance and safety.
Applications of Tactile Sensors in Robotics
Tactile sensors in robotics enable precise manipulation by detecting texture, pressure, and surface contours, essential for tasks like object recognition and grip adjustment. These sensors are crucial in prosthetics, enhancing sensory feedback for more natural hand movements. Their integration improves robotic interaction in unstructured environments, facilitating safer and more adaptive handling of delicate or irregular objects.
Use Cases of Force Sensors in Modern Robotics
Force sensors are critical in modern robotics for applications such as robotic grasping, enabling manipulators to adjust grip strength based on precise force feedback to prevent object damage. They are extensively used in collaborative robots (cobots) to ensure safe human-robot interaction by detecting and responding to unexpected contact forces. Industrial automation also relies on force sensors for assembly tasks, improving accuracy and adaptability by monitoring the forces applied during component fitting and manipulation.
Integration Challenges: Tactile vs Force Sensors
Tactile sensors require complex integration with robotic skin due to their need for high-resolution spatial data and flexible, sensitive materials, whereas force sensors focus on measuring overall load or pressure with simpler attachment requirements. Integrating tactile sensors demands advanced signal processing to interpret localized touch patterns and shear forces, contrasting with the relatively straightforward signal interpretation in force sensors. The trade-off between detailed sensory feedback and ease of integration highlights significant engineering challenges when deploying both sensor types in robotic systems.
Performance Comparison: Accuracy and Sensitivity
Tactile sensors typically offer higher spatial resolution and sensitivity, enabling precise detection of contact location and texture variations, which is critical for robotic manipulation tasks requiring fine touch perception. In contrast, force sensors excel in measuring the magnitude and direction of applied forces with greater accuracy, making them essential for force control and maintaining stability during interaction with objects. Performance differences highlight tactile sensors' superior capability in detecting detailed contact information, whereas force sensors provide robust and reliable force quantification for overall robotic control fidelity.
Future Trends in Robotic Sensor Technology
Tactile sensors in robotics are evolving towards higher spatial resolution and flexibility, enabling more nuanced object manipulation and human-robot interaction. Force sensors are advancing with improved sensitivity and integration capabilities, supporting real-time feedback for enhanced robot precision and safety. Future trends emphasize combining tactile and force sensing in multi-modal sensor arrays, driving smarter, more adaptive robotic systems with better perception and environmental awareness.
Tactile Sensor vs Force Sensor Infographic