Teleoperation in robotics involves remote human control, allowing precise manipulation in complex or unpredictable environments where human judgment is essential. Autonomous operation relies on advanced sensors and algorithms to enable robots to perform tasks independently, improving efficiency and consistency in repetitive or structured settings. Balancing teleoperation and autonomy enhances flexibility, enabling robots to adapt to diverse challenges across industries.
Table of Comparison
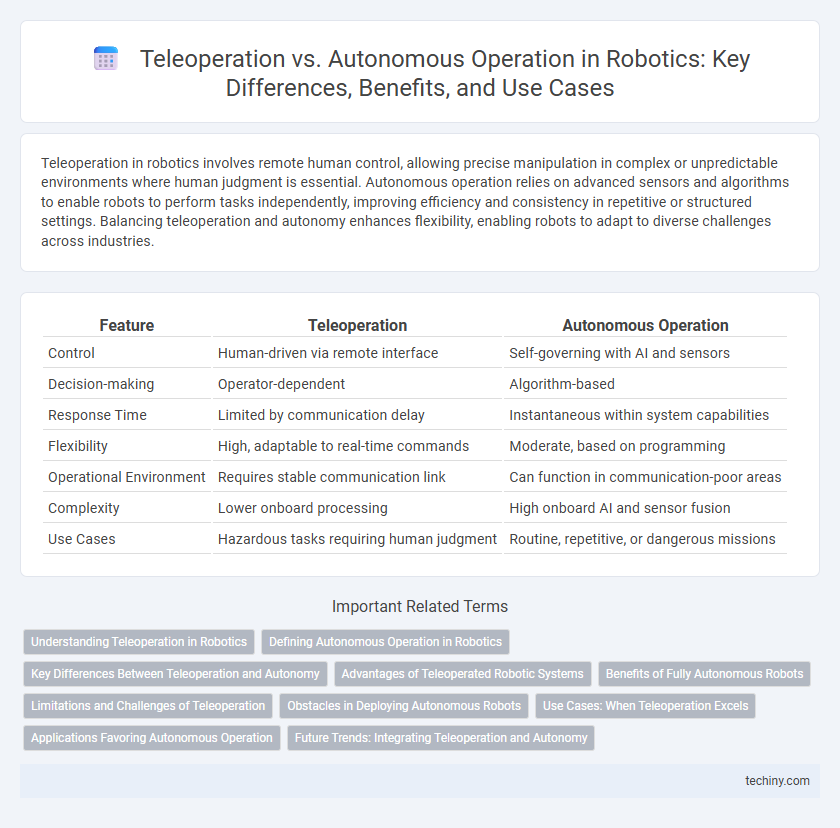
| Feature | Teleoperation | Autonomous Operation |
|---|---|---|
| Control | Human-driven via remote interface | Self-governing with AI and sensors |
| Decision-making | Operator-dependent | Algorithm-based |
| Response Time | Limited by communication delay | Instantaneous within system capabilities |
| Flexibility | High, adaptable to real-time commands | Moderate, based on programming |
| Operational Environment | Requires stable communication link | Can function in communication-poor areas |
| Complexity | Lower onboard processing | High onboard AI and sensor fusion |
| Use Cases | Hazardous tasks requiring human judgment | Routine, repetitive, or dangerous missions |
Understanding Teleoperation in Robotics
Teleoperation in robotics involves remotely controlling robots through human operators using communication networks, enabling precise manipulation in hazardous or inaccessible environments. This approach relies on real-time feedback and intuitive interfaces, allowing operators to perform complex tasks without direct physical presence. Understanding teleoperation is crucial for enhancing safety, operational flexibility, and human-robot collaboration in sectors like manufacturing, healthcare, and exploration.
Defining Autonomous Operation in Robotics
Autonomous operation in robotics refers to the capability of a robot to perform tasks independently without human intervention, using sensors, algorithms, and artificial intelligence to perceive and adapt to its environment. These systems process real-time data to make decisions, navigate complex spaces, and execute functions with high precision and reliability. This autonomy enhances efficiency and safety in applications ranging from manufacturing automation to exploration and medical procedures.
Key Differences Between Teleoperation and Autonomy
Teleoperation involves direct human control over a robot, transmitting real-time commands and feedback through a communication link, while autonomous operation relies on embedded AI algorithms enabling decision-making without human intervention. Teleoperated systems require robust, low-latency communication channels to minimize delays and ensure precise maneuvering, whereas autonomous robots leverage sensors, machine learning, and environment mapping for independent navigation and task execution. Key differences include the level of human involvement, responsiveness to unpredictable environments, and system complexity needed to achieve autonomy versus remote control.
Advantages of Teleoperated Robotic Systems
Teleoperated robotic systems offer enhanced precision and real-time human control, allowing operators to adapt instantly to unpredictable environments. These systems reduce risks by enabling remote handling of hazardous tasks, improving safety in industrial, medical, and defense applications. Furthermore, teleoperation supports complex decision-making through direct human input, surpassing current autonomous algorithms in nuanced or dynamic scenarios.
Benefits of Fully Autonomous Robots
Fully autonomous robots enhance operational efficiency by performing complex tasks without human intervention, reducing labor costs and minimizing human error. These systems leverage advanced sensors and AI algorithms to adapt to dynamic environments, ensuring consistent precision and safety. Autonomous robots enable continuous operation in hazardous or remote areas, significantly expanding the scope of robotic applications across industries.
Limitations and Challenges of Teleoperation
Teleoperation in robotics faces significant limitations including latency issues, restricted sensory feedback, and operator fatigue, which can impair precision and responsiveness. The necessity for continuous human control limits scalability and increases operational costs compared to autonomous systems. Environmental unpredictability and communication disruptions pose further challenges, reducing the reliability of teleoperated robots in complex or remote settings.
Obstacles in Deploying Autonomous Robots
Deploying autonomous robots faces significant challenges in obstacle detection and dynamic environment adaptation, requiring advanced sensors and real-time data processing algorithms to navigate safely. Teleoperation offers a practical alternative by enabling human operators to remotely control robots, circumventing limitations in autonomous decision-making under unpredictable conditions. Integrating robust obstacle avoidance systems remains critical for achieving reliable autonomous operation in complex, unstructured environments.
Use Cases: When Teleoperation Excels
Teleoperation excels in hazardous environments such as nuclear decommissioning, deep-sea exploration, and disaster response where human presence is risky or impossible. It enables operators to maintain real-time control and decision-making from a safe distance, ensuring precision in complex or unpredictable scenarios. Use cases like remote surgery and bomb disposal highlight teleoperation's advantage over autonomous systems in tasks demanding high adaptability and situational awareness.
Applications Favoring Autonomous Operation
Autonomous operation excels in hazardous environments such as deep-sea exploration, space missions, and industrial automation where human intervention is limited or risky. Robotics systems using machine learning and sensor fusion achieve higher efficiency and precision without the latency issues inherent in teleoperation. Extensive data processing enables autonomous robots to adapt to dynamic settings, making them indispensable for applications requiring continuous, real-time decision-making.
Future Trends: Integrating Teleoperation and Autonomy
Future trends in robotics emphasize hybrid systems that seamlessly integrate teleoperation with autonomous operation, enhancing flexibility and efficiency in complex environments. Advancements in AI-driven machine learning algorithms enable robots to switch dynamically between manual remote control and independent decision-making based on contextual data. This integration supports improved safety, real-time adaptability, and increased productivity in sectors such as manufacturing, healthcare, and disaster response.
Teleoperation vs Autonomous Operation Infographic