Holonomic drive systems enable robots to move instantaneously in any direction, offering superior maneuverability and precise control by utilizing omnidirectional wheels or similar mechanisms. In contrast, non-holonomic drive robots have movement constraints, typically limited to forward and rotational motion, which require complex path planning to navigate around obstacles effectively. Choosing between holonomic and non-holonomic drives depends on the specific application's need for agility, complexity, and control precision in robotic movement.
Table of Comparison
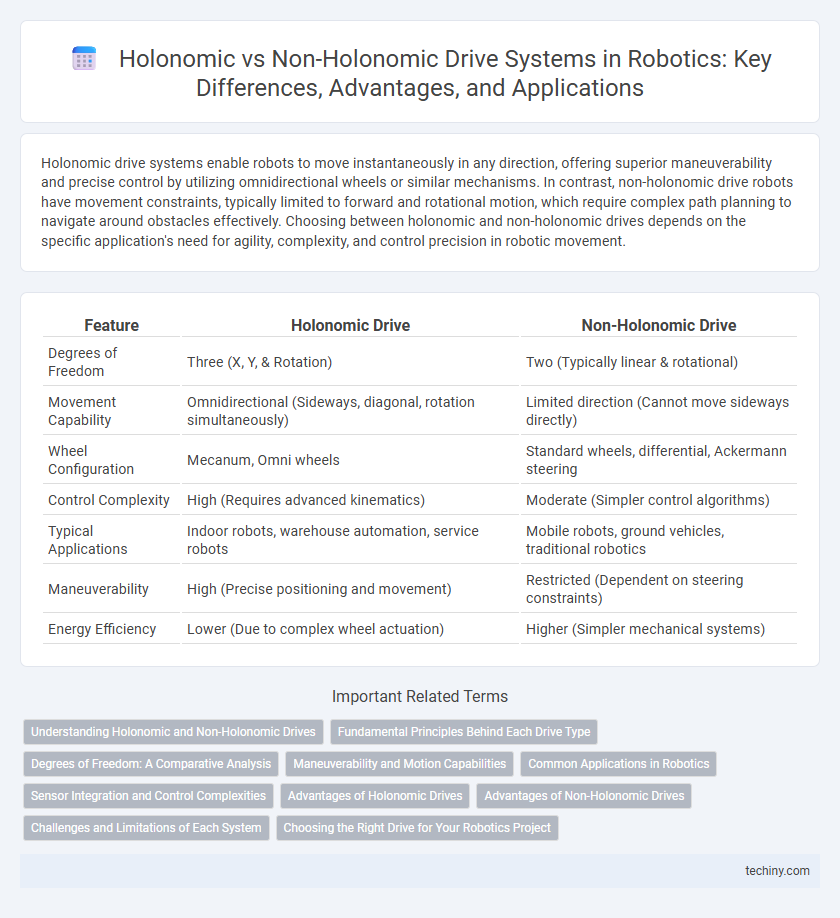
| Feature | Holonomic Drive | Non-Holonomic Drive |
|---|---|---|
| Degrees of Freedom | Three (X, Y, & Rotation) | Two (Typically linear & rotational) |
| Movement Capability | Omnidirectional (Sideways, diagonal, rotation simultaneously) | Limited direction (Cannot move sideways directly) |
| Wheel Configuration | Mecanum, Omni wheels | Standard wheels, differential, Ackermann steering |
| Control Complexity | High (Requires advanced kinematics) | Moderate (Simpler control algorithms) |
| Typical Applications | Indoor robots, warehouse automation, service robots | Mobile robots, ground vehicles, traditional robotics |
| Maneuverability | High (Precise positioning and movement) | Restricted (Dependent on steering constraints) |
| Energy Efficiency | Lower (Due to complex wheel actuation) | Higher (Simpler mechanical systems) |
Understanding Holonomic and Non-Holonomic Drives
Holonomic drives enable robots to move in any direction instantaneously by independently controlling movement along multiple axes, enhancing maneuverability in complex environments. Non-holonomic drives, constrained by non-integrable motion equations, rely on indirect path execution, often limiting movement to forward and rotational motions. Understanding these drive types is crucial for optimizing robot navigation strategies in tasks requiring precise positioning and obstacle avoidance.
Fundamental Principles Behind Each Drive Type
Holonomic drive systems enable movement along any direction simultaneously by controlling all degrees of freedom independently, often utilizing omni or mecanum wheels to achieve this maneuverability. Non-holonomic drives are constrained by non-integrable velocity constraints, typically allowing motion only along certain path trajectories, such as differential or car-like steering mechanisms that prevent lateral slipping. The fundamental principle distinguishing these drives lies in their kinematic constraints: holonomic drives possess equal numbers of controllable inputs and degrees of freedom, while non-holonomic drives have fewer inputs than degrees of freedom, leading to restricted movement capabilities.
Degrees of Freedom: A Comparative Analysis
Holonomic drives offer three or more degrees of freedom, allowing robots to move simultaneously in any direction without changing orientation, which enhances maneuverability in complex environments. Non-holonomic drives restrict motion to fewer degrees of freedom, typically limiting robots to forward and backward movements with constrained turning capabilities, affecting precision in tight spaces. Comparative analysis reveals holonomic systems excel in omnidirectional navigation for tasks in cluttered spaces, while non-holonomic drives provide simpler control suited for linear trajectories and structured paths.
Maneuverability and Motion Capabilities
Holonomic drive systems enable robots to move simultaneously in multiple directions, offering superior maneuverability and precise motion control, ideal for complex navigation in tight spaces. Non-holonomic drives restrict movement to specific paths, typically forward and backward, with limited ability to move laterally, impacting their agility and requiring more planning for turns. This fundamental difference significantly affects robot design choices based on the operational environment and required motion capabilities.
Common Applications in Robotics
Holonomic drive systems, offering full directional mobility, are commonly used in robotics applications requiring precise maneuverability, such as warehouse automation and inspection drones. Non-holonomic drives, with constrained motion along fixed paths, are prevalent in autonomous vehicles and delivery robots where simpler control and stability are prioritized. Industrial robots often select drive types based on task complexity, balancing holonomic versatility against non-holonomic efficiency.
Sensor Integration and Control Complexities
Holonomic drive systems enable omnidirectional movement, allowing seamless integration of advanced sensors such as LiDAR and IMUs for precise localization and navigation, which simplifies control algorithms by offering direct path planning. Non-holonomic drives require more sophisticated control strategies to manage movement restrictions, demanding complex sensor fusion techniques to interpret feedback from encoders and inertial sensors for accurate trajectory tracking. The enhanced maneuverability of holonomic drives reduces control complexities, while non-holonomic systems depend on intricate sensor integration to compensate for limited motion capabilities.
Advantages of Holonomic Drives
Holonomic drives offer superior maneuverability by enabling movement in any direction without changing orientation, improving navigation efficiency in complex environments. They provide enhanced precision and flexibility, crucial for tasks requiring tight turning radii and smooth trajectory control, such as warehouse automation and service robots. Holonomic systems also reduce mechanical wear due to minimized wheel slippage, extending the lifespan of robotic platforms.
Advantages of Non-Holonomic Drives
Non-holonomic drives offer simpler mechanical designs and lower energy consumption, making them cost-effective for many robotic applications. Their reduced degrees of freedom streamline control algorithms, enhancing reliability and stability during movement on flat surfaces. These drives excel in tasks requiring predictable paths, such as automated guided vehicles (AGVs) and warehouse robots.
Challenges and Limitations of Each System
Holonomic drive systems face challenges in complexity and cost due to their reliance on multiple independent actuators for omnidirectional movement, which can complicate control algorithms and maintenance. Non-holonomic drives experience limitations in maneuverability, restricted to specific motion paths like forward and backward or turning on the spot, posing difficulties in tight or dynamic environments. Both systems require trade-offs between mechanical design, control complexity, and operational flexibility to address navigation challenges in robotics applications.
Choosing the Right Drive for Your Robotics Project
Holonomic drives provide robots with omnidirectional movement, enabling precise navigation and complex maneuvering in tight spaces, which is ideal for applications requiring high agility and flexibility. Non-holonomic drives, typically using differential or skid-steering, offer simpler mechanical design and improved stability on uneven terrain, making them suitable for outdoor or heavy-load robotics projects. Selecting the right drive depends on factors such as maneuverability requirements, environmental conditions, and payload demands to optimize performance and control in your robotics project.
Holonomic drive vs Non-holonomic drive Infographic