In-hand manipulation enables robots to reposition or reorient objects within their grasp, offering finer control and dexterity compared to pick-and-place manipulation, which involves moving objects between distinct locations. This capability enhances robotic performance in complex tasks requiring precise adjustments, such as assembly or tool handling. Advancements in sensor technology and gripper design are driving improvements in in-hand manipulation efficiency and reliability.
Table of Comparison
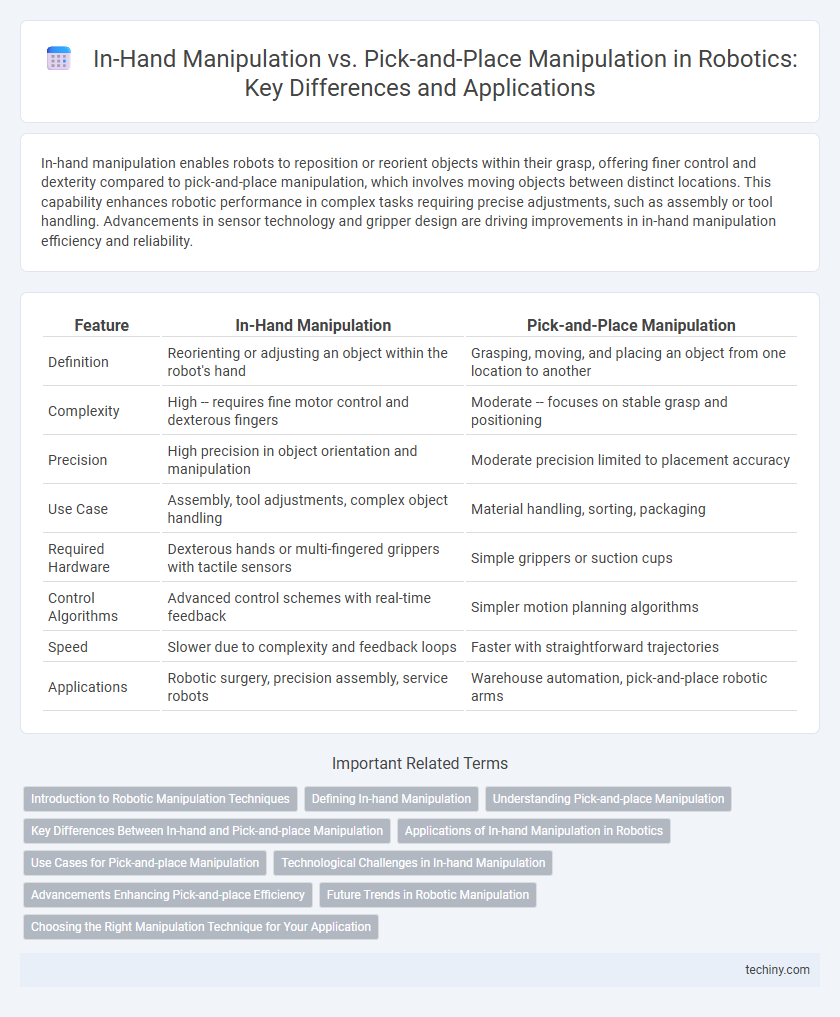
| Feature | In-Hand Manipulation | Pick-and-Place Manipulation |
|---|---|---|
| Definition | Reorienting or adjusting an object within the robot's hand | Grasping, moving, and placing an object from one location to another |
| Complexity | High -- requires fine motor control and dexterous fingers | Moderate -- focuses on stable grasp and positioning |
| Precision | High precision in object orientation and manipulation | Moderate precision limited to placement accuracy |
| Use Case | Assembly, tool adjustments, complex object handling | Material handling, sorting, packaging |
| Required Hardware | Dexterous hands or multi-fingered grippers with tactile sensors | Simple grippers or suction cups |
| Control Algorithms | Advanced control schemes with real-time feedback | Simpler motion planning algorithms |
| Speed | Slower due to complexity and feedback loops | Faster with straightforward trajectories |
| Applications | Robotic surgery, precision assembly, service robots | Warehouse automation, pick-and-place robotic arms |
Introduction to Robotic Manipulation Techniques
In-hand manipulation enables robots to reposition or reorient objects within a single grasp, enhancing dexterity and reducing the need for multiple placements. Pick-and-place manipulation involves gripping, transporting, and releasing objects, focusing on moving items between distinct locations with simpler control strategies. Advanced robotic systems integrate both techniques to achieve complex tasks requiring precision and adaptability.
Defining In-hand Manipulation
In-hand manipulation refers to the robotic capability to adjust and reposition an object within the gripper without releasing it, enabling complex object reorientation and fine-tuned handling. This skill contrasts with pick-and-place manipulation, where the robot grasps an object, moves it to a new location, and releases it without adjusting its orientation during the grip. Mastery of in-hand manipulation enhances robotic dexterity and efficiency in tasks requiring precise object control, such as assembly and intricate sorting operations.
Understanding Pick-and-place Manipulation
Pick-and-place manipulation involves a robotic arm grasping an object, transporting it from one location to another, and releasing it without altering the object's orientation or grip. This process relies heavily on precise end-effector positioning and trajectory planning to ensure successful object transfer within industrial automation tasks. Understanding pick-and-place manipulation is crucial for optimizing robotic workflows in manufacturing, packaging, and assembly lines.
Key Differences Between In-hand and Pick-and-place Manipulation
In-hand manipulation enables robotic hands to reorient and adjust objects within the grasp, allowing for complex, dexterous tasks without repositioning the entire arm, whereas pick-and-place manipulation involves grasping, transporting, and releasing objects between distinct locations. In-hand manipulation relies heavily on tactile sensing and fine motor control to achieve precision, while pick-and-place operations emphasize spatial navigation and robust gripping for object transfer. The key difference lies in the level of control and degrees of freedom: in-hand manipulation focuses on object reconfiguration in-hand, and pick-and-place focuses on object relocation in the environment.
Applications of In-hand Manipulation in Robotics
In-hand manipulation in robotics enables precise object reorientation and dexterous handling without releasing the grasp, critical for tasks requiring fine adjustments such as assembly, complex tool use, and delicate sorting in manufacturing and service robots. This capability enhances robotic flexibility in constrained environments where multiple pick-and-place actions are inefficient or impractical, significantly improving workflow speed and accuracy. Advanced robotic hands with tactile sensing and compliant control leverage in-hand manipulation to perform sophisticated operations in areas like electronics assembly, surgical robotics, and autonomous maintenance.
Use Cases for Pick-and-place Manipulation
Pick-and-place manipulation excels in industrial automation, enabling robots to efficiently move objects between fixed locations on assembly lines, enhancing productivity in manufacturing sectors like electronics and automotive. Its applications extend to packaging, sorting, and palletizing tasks where precision and repeatability are crucial, reducing human labor and minimizing errors. This method supports high-throughput operations in warehouses and distribution centers by handling uniform items with consistent accuracy.
Technological Challenges in In-hand Manipulation
In-hand manipulation presents significant technological challenges compared to pick-and-place manipulation due to the need for precise sensor integration and real-time control algorithms that adapt to complex object dynamics during dexterous movements. Advanced tactile sensing, high-resolution force feedback, and compliant robotic grippers are critical to successfully manage the manipulation of diverse shapes, weights, and textures within the robot's hand. Achieving stability in grasp and coordinated finger motions requires overcoming issues in motion planning, control precision, and robust hardware design to enable reliable and efficient manipulation in unstructured environments.
Advancements Enhancing Pick-and-place Efficiency
Advancements in machine learning algorithms and high-precision sensors have significantly enhanced pick-and-place manipulation efficiency by enabling robots to adapt dynamically to varied object geometries and positions. Integration of force feedback and real-time visual processing allows for precise grasp adjustments, reducing error rates and cycle times in industrial applications. Collaborative robots featuring improved end-effectors and AI-driven control systems further optimize pick-and-place operations by seamlessly handling complex and delicate tasks.
Future Trends in Robotic Manipulation
Future trends in robotic manipulation emphasize advanced in-hand manipulation techniques that enable robots to reorient and adjust objects with high precision using multi-fingered grippers and tactile sensors. These capabilities surpass traditional pick-and-place manipulation by allowing more complex tasks such as intricate assembly, tool use, and adaptive grip during dynamic interactions. Research in machine learning, sensor fusion, and compliant robotics drives progress toward more dexterous and autonomous robotic hands capable of performing versatile manipulation tasks in unstructured environments.
Choosing the Right Manipulation Technique for Your Application
In-hand manipulation enables robots to adjust object orientation and position using dexterous finger movements, crucial for tasks requiring fine control in constrained environments. Pick-and-place manipulation, relying on grippers to relocate objects between points, suits applications prioritizing speed and simplicity with less complex object handling. Selecting the appropriate manipulation technique depends on task requirements, object complexity, workspace constraints, and the desired precision level to optimize robotic system performance.
In-hand manipulation vs Pick-and-place manipulation Infographic