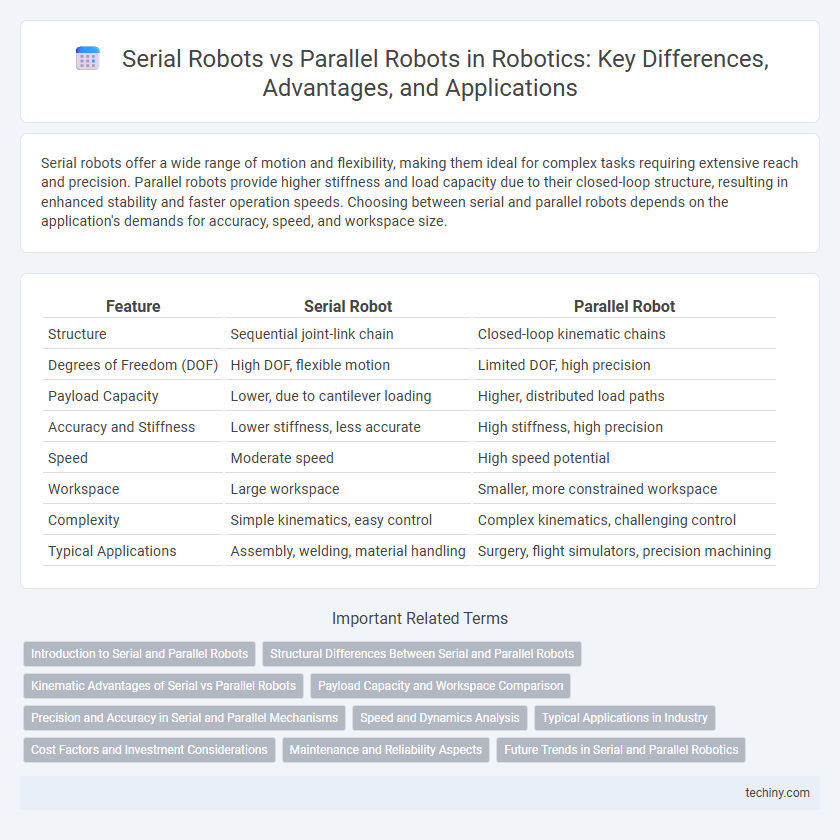
Serial robots offer a wide range of motion and flexibility, making them ideal for complex tasks requiring extensive reach and precision. Parallel robots provide higher stiffness and load capacity due to their closed-loop structure, resulting in enhanced stability and faster operation speeds. Choosing between serial and parallel robots depends on the application's demands for accuracy, speed, and workspace size.
Table of Comparison
| Feature | Serial Robot | Parallel Robot |
|---|---|---|
| Structure | Sequential joint-link chain | Closed-loop kinematic chains |
| Degrees of Freedom (DOF) | High DOF, flexible motion | Limited DOF, high precision |
| Payload Capacity | Lower, due to cantilever loading | Higher, distributed load paths |
| Accuracy and Stiffness | Lower stiffness, less accurate | High stiffness, high precision |
| Speed | Moderate speed | High speed potential |
| Workspace | Large workspace | Smaller, more constrained workspace |
| Complexity | Simple kinematics, easy control | Complex kinematics, challenging control |
| Typical Applications | Assembly, welding, material handling | Surgery, flight simulators, precision machining |
Introduction to Serial and Parallel Robots
Serial robots consist of a series of joints and links connected end-to-end, allowing high flexibility and reach in industrial applications such as assembly and welding. Parallel robots feature multiple arms connected to a common base and end-effector, offering superior stiffness, precision, and load capacity, commonly used in tasks requiring high accuracy like surgical procedures and flight simulators. The fundamental difference lies in their kinematic structure, which impacts their workspace, payload, and control complexity.
Structural Differences Between Serial and Parallel Robots
Serial robots consist of a chain of actuated joints connected end-to-end, creating an open kinematic chain that allows for a wide range of motion but often results in lower load capacity and reduced stiffness. Parallel robots feature multiple kinematic chains that connect the base to the end-effector simultaneously, forming a closed-loop structure that enhances rigidity, precision, and load-bearing capabilities. The fundamental structural difference lies in the serial arrangement of joints versus the concurrent operation of multiple limbs, influencing their respective applications in tasks requiring either flexibility or high accuracy.
Kinematic Advantages of Serial vs Parallel Robots
Serial robots feature a straightforward kinematic chain with a single open loop, allowing for a larger work envelope and simpler inverse kinematics calculations, which facilitates easier programming and control. Parallel robots possess closed-loop kinematic chains that provide higher stiffness, greater payload capacity, and improved positioning accuracy due to distributed load sharing among multiple legs. The choice between serial and parallel robots depends on application-specific kinematic requirements, balancing workspace size, precision, and rigidity.
Payload Capacity and Workspace Comparison
Serial robots typically offer a larger workspace due to their extended kinematic chains but have lower payload capacity because each joint adds to the cumulative load. Parallel robots feature a more compact structure, resulting in higher payload capacity and greater stiffness, though their workspace is more limited. The choice between serial and parallel robots depends on the application's requirements for reach and load handling.
Precision and Accuracy in Serial and Parallel Mechanisms
Serial robots generally demonstrate higher reach but suffer from cumulative error accumulation, leading to lower precision and accuracy compared to parallel robots. Parallel robots feature closed-loop kinematic chains that enhance structural stiffness, resulting in superior accuracy and repeatability in high-precision tasks. The inherent design of parallel mechanisms minimizes deflection under load, providing better positional stability and consistent precision in complex robotic operations.
Speed and Dynamics Analysis
Serial robots typically exhibit lower speeds and reduced dynamic performance due to their series-linked joint structure causing cumulative inertia and torque demands. Parallel robots offer superior speed and dynamic capabilities because their closed-loop kinematic chains distribute loads more efficiently, resulting in higher stiffness and faster acceleration. Speed and dynamics analyses highlight parallel robots as optimal for high-precision, rapid tasks, whereas serial robots are favored for greater reach and mechanical simplicity despite slower operation.
Typical Applications in Industry
Serial robots excel in assembly, welding, and material handling tasks due to their flexible reach and adaptability in automotive and electronics manufacturing. Parallel robots are preferred for high-precision applications such as CNC machining, flight simulators, and medical surgery robots, benefiting from their rigidity and load-bearing capacity. Industrial sectors leverage serial robots for large workspace requirements, while parallel robots dominate tasks demanding speed and accuracy within confined spaces.
Cost Factors and Investment Considerations
Serial robots generally involve lower initial investment costs due to simpler mechanical structures and easier programming, making them ideal for applications requiring flexibility and moderate precision. In contrast, parallel robots demand higher upfront expenditure because of complex mechanics and precise calibration but offer superior stiffness and accuracy, reducing long-term operational costs in high-precision tasks. Cost factors must balance purchase price, maintenance expenses, and application-specific efficiency to determine the most cost-effective solution for robotics investment.
Maintenance and Reliability Aspects
Serial robots generally require more frequent maintenance due to their numerous joints and moving parts, which increases the risk of wear and tear. Parallel robots offer higher reliability with fewer mechanical components, reducing downtime and maintenance costs. Their rigid structure enhances stability, making them ideal for high-precision applications where maintenance intervals need to be minimized.
Future Trends in Serial and Parallel Robotics
Future trends in serial robots emphasize enhanced precision and adaptability through AI-driven control systems, enabling complex tasks in dynamic environments. Parallel robots are advancing with improved rigidity and speed, leveraging novel materials and integrated sensor networks for real-time feedback to boost accuracy in high-load applications. Hybrid systems combining serial and parallel architectures are emerging, optimizing flexibility and strength to meet diverse industrial and medical robotics demands.
Serial robot vs Parallel robot Infographic