Simultaneous Localization and Mapping (SLAM) provides robots with real-time environment mapping and precise positioning by combining sensor data, whereas dead reckoning estimates position based solely on previous movement and heading information, often accumulating errors over time. SLAM's integration of sensor fusion techniques significantly reduces drift and enhances navigation accuracy, making it ideal for dynamic or unknown environments. Dead reckoning remains useful for short-term localization where sensor data is limited but lacks long-term reliability without external corrections.
Table of Comparison
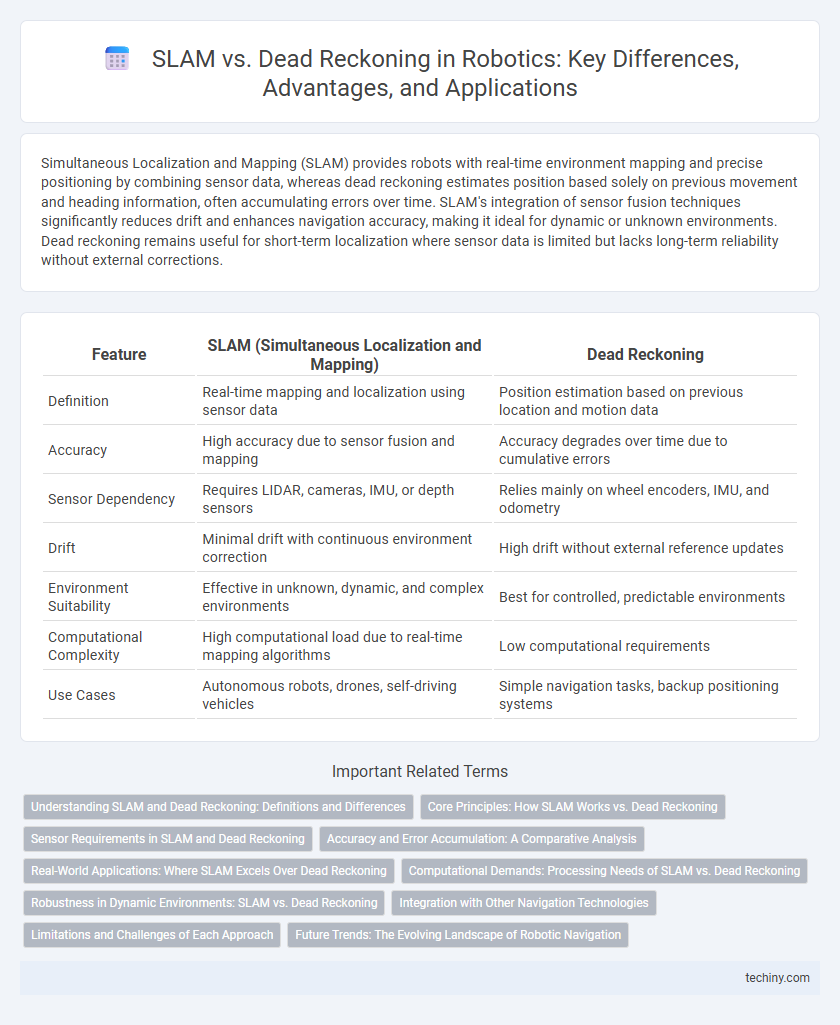
| Feature | SLAM (Simultaneous Localization and Mapping) | Dead Reckoning |
|---|---|---|
| Definition | Real-time mapping and localization using sensor data | Position estimation based on previous location and motion data |
| Accuracy | High accuracy due to sensor fusion and mapping | Accuracy degrades over time due to cumulative errors |
| Sensor Dependency | Requires LIDAR, cameras, IMU, or depth sensors | Relies mainly on wheel encoders, IMU, and odometry |
| Drift | Minimal drift with continuous environment correction | High drift without external reference updates |
| Environment Suitability | Effective in unknown, dynamic, and complex environments | Best for controlled, predictable environments |
| Computational Complexity | High computational load due to real-time mapping algorithms | Low computational requirements |
| Use Cases | Autonomous robots, drones, self-driving vehicles | Simple navigation tasks, backup positioning systems |
Understanding SLAM and Dead Reckoning: Definitions and Differences
Simultaneous Localization and Mapping (SLAM) enables robots to build a map of an unknown environment while tracking their position, using sensor data like lidar, cameras, or sonar. Dead reckoning estimates a robot's current position by calculating distance and direction traveled from a known start point, relying heavily on wheel encoders or inertial measurement units, but accumulates errors over time. Unlike dead reckoning, SLAM continuously corrects for positional errors by integrating real-time sensor observations, providing more accurate navigation in dynamic or unmapped environments.
Core Principles: How SLAM Works vs. Dead Reckoning
Simultaneous Localization and Mapping (SLAM) dynamically builds a map while computing the robot's position by integrating sensor data such as lidar, cameras, and odometry for real-time environment mapping. Dead reckoning calculates position based on previous locations and motion estimates using wheel encoders or inertial sensors but accumulates errors over time without external correction. SLAM relies on probabilistic algorithms like Extended Kalman Filters or particle filters to minimize localization drift, whereas dead reckoning depends solely on incremental distance and heading measurements, making it less accurate in complex or unknown environments.
Sensor Requirements in SLAM and Dead Reckoning
SLAM relies heavily on diverse sensors such as LiDAR, cameras, and IMUs to continuously map surroundings and localize the robot with high accuracy, whereas dead reckoning primarily depends on wheel encoders and basic inertial sensors, which accumulate error over time. The sensor fusion in SLAM allows real-time environment mapping and correction of positional drift, making it suitable for dynamic and unknown environments. In contrast, dead reckoning's limited sensor suite restricts its effectiveness to short durations or static, predictable settings, leading to increased positional uncertainty without external corrections.
Accuracy and Error Accumulation: A Comparative Analysis
Simultaneous Localization and Mapping (SLAM) significantly outperforms dead reckoning in terms of accuracy by continuously updating the robot's position using sensor data and environmental mapping, reducing cumulative errors. Dead reckoning relies on integrating motion data such as wheel encoders and inertial sensors, which causes error accumulation over time due to sensor noise and drift, leading to decreased localization precision. SLAM algorithms leverage probabilistic models and loop closure techniques to correct positional errors, maintaining high accuracy even in complex, dynamic environments.
Real-World Applications: Where SLAM Excels Over Dead Reckoning
SLAM (Simultaneous Localization and Mapping) excels over dead reckoning in complex, dynamic environments such as autonomous vehicles and robotic vacuum cleaners by providing accurate real-time mapping and localization despite sensor noise and environmental changes. Unlike dead reckoning, which accumulates error from wheel slips or sensor drift, SLAM integrates data from multiple sensors like LiDAR, cameras, and IMUs to maintain precise positional awareness. This capability makes SLAM essential for navigation in unknown or GPS-denied environments, including indoor mapping, search and rescue missions, and warehouse automation.
Computational Demands: Processing Needs of SLAM vs. Dead Reckoning
SLAM (Simultaneous Localization and Mapping) requires significantly higher computational power due to its need to process sensor data, build maps in real-time, and perform complex algorithms for localization. Dead reckoning relies on straightforward calculations using sensor inputs like wheel encoders and inertial measurement units, resulting in much lower processing requirements. The intensive memory usage and processing demands of SLAM make it suitable for systems with robust hardware, while dead reckoning is preferred for simpler, resource-constrained robotic platforms.
Robustness in Dynamic Environments: SLAM vs. Dead Reckoning
Simultaneous Localization and Mapping (SLAM) demonstrates superior robustness in dynamic environments by continuously updating maps and correcting positional errors through sensor feedback, unlike dead reckoning which accumulates drift due to uncorrected odometry errors. SLAM algorithms utilize data from lidar, cameras, and IMUs to adapt to environmental changes, maintaining accurate localization and navigation. Dead reckoning's reliance on incremental movement data without environmental referencing makes it vulnerable to inaccuracies caused by wheel slippage and changing surroundings.
Integration with Other Navigation Technologies
SLAM (Simultaneous Localization and Mapping) integrates effectively with GPS and IMU data to enhance real-time mapping accuracy and robot localization, especially in unknown or dynamic environments. Dead reckoning relies predominantly on internal sensors like wheel encoders and gyroscopes, which can be fused with external aids such as GPS for improved position estimation but tends to suffer from cumulative drift over time. Combining SLAM with external navigation technologies results in robust, adaptive navigation systems crucial for autonomous robots operating in complex and GPS-denied areas.
Limitations and Challenges of Each Approach
SLAM (Simultaneous Localization and Mapping) faces challenges such as high computational requirements and sensitivity to sensor noise, which can lead to map inaccuracies in dynamic environments. Dead reckoning suffers from cumulative errors due to wheel slippage and sensor drift, causing significant position estimation inaccuracies over time. Both approaches require careful sensor integration and frequent calibration to mitigate these limitations in robotic navigation systems.
Future Trends: The Evolving Landscape of Robotic Navigation
Future trends in robotic navigation emphasize the integration of SLAM (Simultaneous Localization and Mapping) with advanced sensor fusion techniques to overcome the limitations of traditional dead reckoning methods. Innovations in machine learning and real-time data processing enable more accurate and adaptive environment mapping, enhancing autonomous navigation in dynamic and complex settings. The evolving landscape prioritizes scalability and robustness, facilitating the deployment of robots in diverse applications from autonomous vehicles to industrial automation.
SLAM vs Dead reckoning Infographic