Holonomic robots possess the ability to move instantaneously in any direction on their plane of motion, providing superior maneuverability and precision, which is essential for complex navigation tasks. Non-holonomic robots, constrained by motion limitations such as fixed wheels or steering mechanisms, face challenges in path planning but often excel in stability and energy efficiency. Understanding the distinction between holonomic and non-holonomic robots informs design choices in robotics applications requiring specific movement capabilities and operational environments.
Table of Comparison
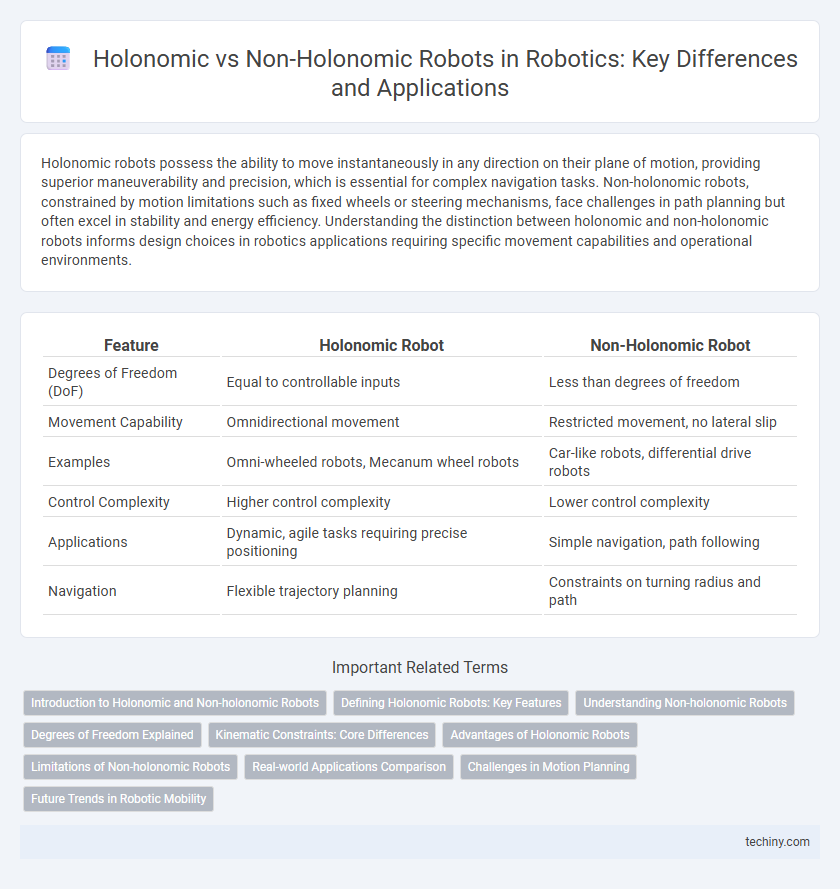
| Feature | Holonomic Robot | Non-Holonomic Robot |
|---|---|---|
| Degrees of Freedom (DoF) | Equal to controllable inputs | Less than degrees of freedom |
| Movement Capability | Omnidirectional movement | Restricted movement, no lateral slip |
| Examples | Omni-wheeled robots, Mecanum wheel robots | Car-like robots, differential drive robots |
| Control Complexity | Higher control complexity | Lower control complexity |
| Applications | Dynamic, agile tasks requiring precise positioning | Simple navigation, path following |
| Navigation | Flexible trajectory planning | Constraints on turning radius and path |
Introduction to Holonomic and Non-holonomic Robots
Holonomic robots possess the ability to move instantaneously in any direction within their configuration space, offering full controllability over their degrees of freedom, which is essential for precise maneuvering in complex environments. Non-holonomic robots have constraints on their motion, typically limiting them to paths that do not allow lateral movement, such as wheeled robots that cannot move sideways, requiring more sophisticated path planning algorithms. Understanding the fundamental kinematic differences between holonomic and non-holonomic robots is critical for designing control systems and navigation strategies in robotics applications.
Defining Holonomic Robots: Key Features
Holonomic robots feature movement capabilities where the number of controllable degrees of freedom equals the total degrees of freedom, enabling omnidirectional mobility and precise navigation in constrained environments. These robots often employ specialized wheel designs like omni-wheels or mecanum wheels to achieve instantaneous movement in any direction without changing orientation. Key applications include warehouse automation and service robotics, where maneuverability and spatial efficiency are critical.
Understanding Non-holonomic Robots
Non-holonomic robots are characterized by motion constraints that limit their ability to move freely in all directions, primarily due to kinematic restrictions like non-slipping wheels. These robots often require complex path planning algorithms to navigate environments effectively, as they cannot instantaneously change their velocity vector or orientation. Understanding the non-holonomic constraints is essential for designing control strategies that ensure efficient maneuverability and stability in robotic applications such as autonomous vehicles and mobile platforms.
Degrees of Freedom Explained
Holonomic robots possess as many controllable degrees of freedom (DOF) as their configuration space dimensions, allowing movement in any direction instantaneously, such as omnidirectional wheels enabling lateral and rotational motion simultaneously. Non-holonomic robots have fewer controllable DOF than their configuration space, restricting their movement to specific trajectories due to constraints like no lateral wheel slippage, often seen in conventional wheeled robots like cars. Understanding the difference in degrees of freedom is crucial for designing control systems and navigation algorithms in robotics, impacting maneuverability and task execution capabilities.
Kinematic Constraints: Core Differences
Holonomic robots possess kinematic constraints that allow movement in all directions within their configuration space, providing full controllability and maneuverability. Non-holonomic robots are restricted by non-integrable kinematic constraints, limiting their motion to specific paths and preventing lateral or sideways movement. These fundamental differences in kinematic constraints heavily influence trajectory planning, control algorithms, and overall robot flexibility in various applications.
Advantages of Holonomic Robots
Holonomic robots offer superior maneuverability by allowing movement in any direction without changing orientation, significantly enhancing navigation in cluttered or dynamic environments. They enable precise control over position and velocity, which improves task efficiency in applications requiring complex path planning and real-time adjustments. This flexibility makes holonomic robots ideal for industrial automation, service robots, and autonomous vehicles where adaptive and smooth movement is critical.
Limitations of Non-holonomic Robots
Non-holonomic robots are constrained by their inability to move directly in certain directions due to non-integrable velocity constraints, making their motion planning more complex. These robots typically cannot achieve arbitrary orientation and position simultaneously, limiting their maneuverability in tight or dynamic environments. As a result, non-holonomic systems require more sophisticated control algorithms to navigate obstacles and perform precise tasks compared to holonomic robots.
Real-world Applications Comparison
Holonomic robots offer superior maneuverability in complex environments, making them ideal for automated warehousing and precision inspection tasks where omnidirectional movement is crucial. Non-holonomic robots, constrained by their limited degrees of freedom, excel in applications like autonomous ground vehicles and agricultural machinery, where predictable, forward-focused mobility ensures stability and efficiency. Real-world deployments demonstrate holonomic systems' benefits in confined, dynamic spaces, while non-holonomic robots perform best in structured, linear operational settings.
Challenges in Motion Planning
Holonomic robots, with their ability to move freely in multiple directions simultaneously, simplify motion planning by allowing more flexible path optimization in constrained environments. Non-holonomic robots face significant challenges in motion planning due to their kinematic constraints, such as limited turning radius and inability to move sideways, which require complex algorithms for trajectory generation and obstacle avoidance. These constraints increase computational complexity and demand sophisticated control strategies to achieve smooth and feasible paths.
Future Trends in Robotic Mobility
Holonomic robots, equipped with omnidirectional wheels, enable seamless movement in any direction, promising enhanced maneuverability in complex environments such as warehouses and hospitals. Non-holonomic robots, relying on constraints like fixed wheeled steering, remain crucial in applications demanding stability and energy efficiency, including autonomous vehicles and agricultural machinery. Future trends emphasize hybrid mobility systems leveraging AI and sensor fusion to optimize path planning and adaptability in dynamic settings, driving advancements in both holonomic and non-holonomic robotic platforms.
Holonomic robot vs Non-holonomic robot Infographic