Laser rangefinders provide high-precision distance measurements with rapid response times, making them ideal for applications requiring detailed environmental mapping in robotics. Ultrasonic sensors, while less accurate, offer cost-effective obstacle detection and perform well in various lighting conditions due to their reliance on sound waves. Choosing between these sensors depends on the specific requirements for accuracy, range, and environmental adaptability in robotic navigation and object detection.
Table of Comparison
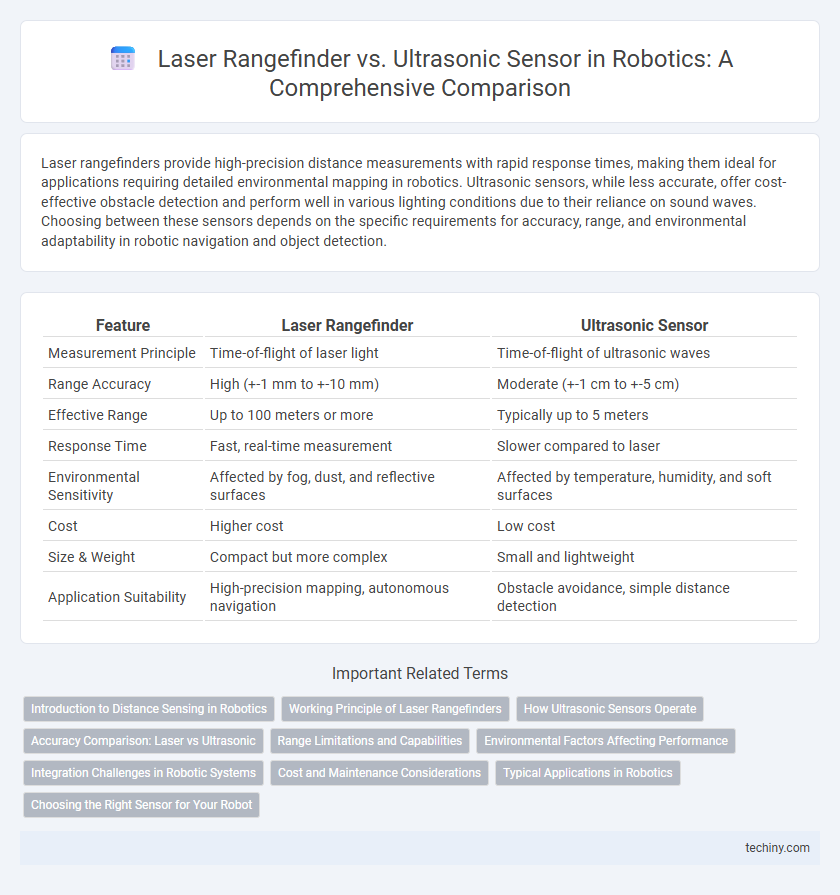
| Feature | Laser Rangefinder | Ultrasonic Sensor |
|---|---|---|
| Measurement Principle | Time-of-flight of laser light | Time-of-flight of ultrasonic waves |
| Range Accuracy | High (+-1 mm to +-10 mm) | Moderate (+-1 cm to +-5 cm) |
| Effective Range | Up to 100 meters or more | Typically up to 5 meters |
| Response Time | Fast, real-time measurement | Slower compared to laser |
| Environmental Sensitivity | Affected by fog, dust, and reflective surfaces | Affected by temperature, humidity, and soft surfaces |
| Cost | Higher cost | Low cost |
| Size & Weight | Compact but more complex | Small and lightweight |
| Application Suitability | High-precision mapping, autonomous navigation | Obstacle avoidance, simple distance detection |
Introduction to Distance Sensing in Robotics
Laser rangefinders provide precise distance measurements by emitting laser beams and calculating the time taken for the reflection to return, offering high accuracy and long-range capabilities ideal for detailed mapping and obstacle detection. Ultrasonic sensors use sound waves to determine distances by measuring the echo return time, functioning effectively in short to medium ranges and excelling in environments where transparency and reflectivity affect laser performance. Both sensors are fundamental in robotics for accurate environment perception, enabling real-time navigation, collision avoidance, and spatial awareness.
Working Principle of Laser Rangefinders
Laser rangefinders operate by emitting a focused laser beam towards a target and measuring the time taken for the reflected light to return, a method known as time-of-flight. This precise measurement enables high-resolution distance calculations often exceeding the accuracy of ultrasonic sensors, which rely on sound wave reflection. The coherent light used in laser rangefinders also permits longer detection ranges and improved resistance to environmental noise.
How Ultrasonic Sensors Operate
Ultrasonic sensors operate by emitting high-frequency sound waves that travel through the air until they encounter an object and reflect back to the sensor. The time taken for the echo to return is measured and converted into a distance value using the speed of sound. This method allows ultrasonic sensors to detect objects regardless of color or transparency, making them effective in various robotic applications.
Accuracy Comparison: Laser vs Ultrasonic
Laser rangefinders provide superior accuracy compared to ultrasonic sensors, achieving precise distance measurements with errors as low as a few millimeters over several meters. Ultrasonic sensors typically exhibit larger measurement errors due to signal scattering and environmental interference, resulting in less reliable distance readings. This high precision of laser rangefinders makes them ideal for applications requiring detailed spatial mapping and obstacle detection in robotics.
Range Limitations and Capabilities
Laser rangefinders offer precise distance measurements up to several hundred meters with high accuracy and resolution, making them ideal for long-range detection and mapping in robotics. Ultrasonic sensors have a more limited range, typically up to 4-5 meters, and are better suited for close-range obstacle detection due to their lower accuracy and susceptibility to environmental interference. The choice between these sensors depends on the required sensing distance, environmental conditions, and the robot's application needs.
Environmental Factors Affecting Performance
Laser rangefinders deliver precise distance measurements but are sensitive to environmental factors such as fog, dust, and ambient light, which can scatter or absorb the laser beam, reducing accuracy. Ultrasonic sensors perform better in dusty or smoky conditions since sound waves are less affected by particles in the air, yet their performance deteriorates in environments with soft or absorbent surfaces that dampen echo returns. Both sensors suffer limitations due to temperature, humidity, and surface reflectivity, influencing signal strength and measurement reliability in robotic applications.
Integration Challenges in Robotic Systems
Integrating laser rangefinders in robotic systems involves challenges such as higher power consumption and complex signal processing requirements compared to ultrasonic sensors, which are simpler but suffer from lower accuracy and shorter range. Laser sensors demand precise calibration and robust algorithms to interpret reflected light data, complicating hardware and software synchronization within the robotic control system. Ultrasonic sensors, while easier to integrate due to straightforward time-of-flight measurements, can face interference in noisy environments, affecting consistent obstacle detection and overall system reliability.
Cost and Maintenance Considerations
Laser rangefinders typically incur higher upfront costs compared to ultrasonic sensors but offer greater accuracy and longer measurement ranges, reducing the need for frequent recalibrations. Ultrasonic sensors are more affordable and simpler to maintain due to fewer moving parts and less sensitivity to environmental factors, which lowers overall operational expenses. Cost-benefit analysis must weigh initial investment against long-term reliability and precision requirements in robotic applications.
Typical Applications in Robotics
Laser rangefinders excel in applications requiring high precision and long-range distance measurements, such as autonomous navigation, mapping, and obstacle detection in drones and mobile robots. Ultrasonic sensors are widely used for short-range object detection, collision avoidance, and proximity sensing due to their affordability and effectiveness in diverse environmental conditions. Both technologies complement robotic systems by enabling spatial awareness, with laser rangefinders favored for detailed scanning and ultrasonic sensors preferred for simple, robust detection tasks.
Choosing the Right Sensor for Your Robot
Laser rangefinders provide high-precision distance measurements with accurate, long-range detection up to several hundred meters, ideal for autonomous navigation in complex environments. Ultrasonic sensors offer cost-effective, short-range obstacle detection around a few meters, suitable for simple indoor applications and proximity sensing. Selecting the right sensor depends on the robot's operational range, required accuracy, and environmental conditions, with laser sensors excelling in detailed mapping and ultrasonic sensors favored for budget-friendly collision avoidance.
Laser rangefinder vs Ultrasonic sensor Infographic