End-effectors are the tools or devices attached to the end of a robotic arm designed to interact with the environment, such as grippers, welders, or cameras. Actuators are the components responsible for moving and controlling the robotic arm's joints, converting energy into mechanical motion. The distinction lies in end-effectors performing task-specific functions while actuators enable the robot's mobility and precision.
Table of Comparison
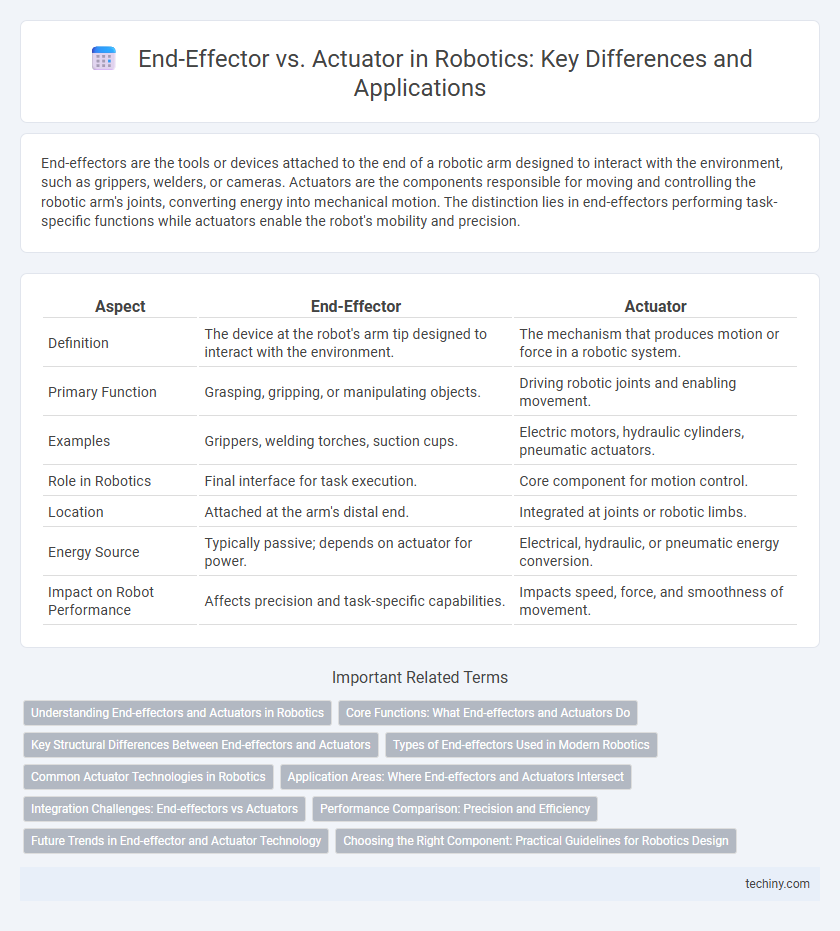
| Aspect | End-Effector | Actuator |
|---|---|---|
| Definition | The device at the robot's arm tip designed to interact with the environment. | The mechanism that produces motion or force in a robotic system. |
| Primary Function | Grasping, gripping, or manipulating objects. | Driving robotic joints and enabling movement. |
| Examples | Grippers, welding torches, suction cups. | Electric motors, hydraulic cylinders, pneumatic actuators. |
| Role in Robotics | Final interface for task execution. | Core component for motion control. |
| Location | Attached at the arm's distal end. | Integrated at joints or robotic limbs. |
| Energy Source | Typically passive; depends on actuator for power. | Electrical, hydraulic, or pneumatic energy conversion. |
| Impact on Robot Performance | Affects precision and task-specific capabilities. | Impacts speed, force, and smoothness of movement. |
Understanding End-effectors and Actuators in Robotics
End-effectors are specialized tools attached to the robot's arm designed to interact with the environment, performing tasks such as gripping, welding, or painting. Actuators are the mechanical components responsible for converting energy into motion, driving the movement of joints, end-effectors, and robotic limbs. Understanding the distinction between end-effectors and actuators is essential for optimizing robotic functionality and task precision.
Core Functions: What End-effectors and Actuators Do
End-effectors serve as the robotic hand or tool, interacting directly with objects to perform tasks like gripping, welding, or cutting. Actuators function as the muscles of the robot, converting energy into precise mechanical motion to drive joints and enable movement. Together, actuators provide the necessary force and control, while end-effectors execute the specific manipulation required for diverse applications in automation and robotics.
Key Structural Differences Between End-effectors and Actuators
End-effectors are the specialized tools or grippers attached at the robot's wrist designed to interact directly with the environment, while actuators are the mechanical components responsible for movement and force generation within the robotic joints. Structurally, end-effectors often include fingers, suction cups, or welding torches tailored for specific tasks, whereas actuators typically consist of electric motors, hydraulic cylinders, or pneumatic devices that drive the robot's articulation. The key difference lies in their function: end-effectors execute the task-specific interaction, whereas actuators enable the robot's overall motion and positioning.
Types of End-effectors Used in Modern Robotics
Modern robotics employs a diverse range of end-effectors tailored for specific tasks, including grippers, suction cups, and welding torches, each optimizing the robot's interaction with objects. End-effectors convert the robot's actuator-driven motions into precise manipulations, enabling applications from assembly lines to delicate surgical procedures. Understanding the types of end-effectors enhances the selection process for automation solutions, maximizing efficiency and operational flexibility.
Common Actuator Technologies in Robotics
Common actuator technologies in robotics include electric motors, pneumatic cylinders, and hydraulic actuators, each providing distinct advantages in precision, force, and speed. Electric motors, such as servo and stepper motors, dominate robotic applications due to their accuracy and ease of control. Pneumatic actuators deliver rapid, lightweight motion ideal for pick-and-place tasks, while hydraulic actuators excel in high-force operations requiring robust power outputs.
Application Areas: Where End-effectors and Actuators Intersect
End-effectors and actuators intersect primarily in robotics applications requiring precise manipulation and movement, such as assembly lines and medical surgery robots. Actuators provide the necessary motion and force to the robotic arm, while end-effectors enable interaction with objects by performing tasks like gripping, welding, or cutting. Key sectors include automotive manufacturing, where precision welding end-effectors rely on complex actuators, and healthcare, where robotic surgical tools blend advanced actuators with specialized end-effectors for minimally invasive procedures.
Integration Challenges: End-effectors vs Actuators
Integration challenges in robotics arise from the differing functional roles and design requirements of end-effectors and actuators. End-effectors demand precise compatibility with diverse task-specific tools and sensors, requiring adaptable mounting interfaces and communication protocols. Actuators must ensure seamless power delivery, control signal synchronization, and mechanical alignment to maintain system responsiveness and reliability during complex maneuvers.
Performance Comparison: Precision and Efficiency
End-effectors in robotics deliver high precision by directly interacting with the environment, enabling accurate manipulation and task-specific adaptations. Actuators influence performance by converting energy into motion with varying efficiency depending on type, such as electric, hydraulic, or pneumatic systems. Comparing both, end-effectors excel in task-specific accuracy while actuators determine the overall system's responsiveness and energy consumption efficiency.
Future Trends in End-effector and Actuator Technology
Future trends in end-effector technology emphasize adaptive gripping mechanisms using soft robotics and AI-driven tactile sensors for enhanced precision. Actuator advancements focus on energy-efficient, compact designs integrating smart materials like piezoelectrics and shape-memory alloys to enable smoother, more responsive motion control. The convergence of these technologies promises more dexterous, autonomous robots capable of complex manipulation tasks in dynamic environments.
Choosing the Right Component: Practical Guidelines for Robotics Design
Selecting the right end-effector or actuator depends on the specific task requirements and operational environment of the robot; end-effectors like grippers or welding torches must align with the manipulation needs, while actuators such as servo motors or pneumatic cylinders provide the necessary motion and force. Key factors include payload capacity, precision, speed, and compatibility with control systems to ensure seamless integration and optimal performance. Evaluating power consumption, maintenance demands, and cost-effectiveness guides designers in balancing efficiency and durability for practical robotics applications.
End-effector vs Actuator Infographic