Task space control directs robot movements based on end-effector position and orientation, enabling precise interaction with the environment, while joint space control manages individual joint angles directly, simplifying trajectory planning. Task space control is often preferred for tasks requiring accurate tool placement and adaptability, whereas joint space control excels in optimizing internal motion efficiency and avoiding joint limits. Integrating both methods can enhance robotic performance by combining environmental responsiveness with smooth, efficient joint movements.
Table of Comparison
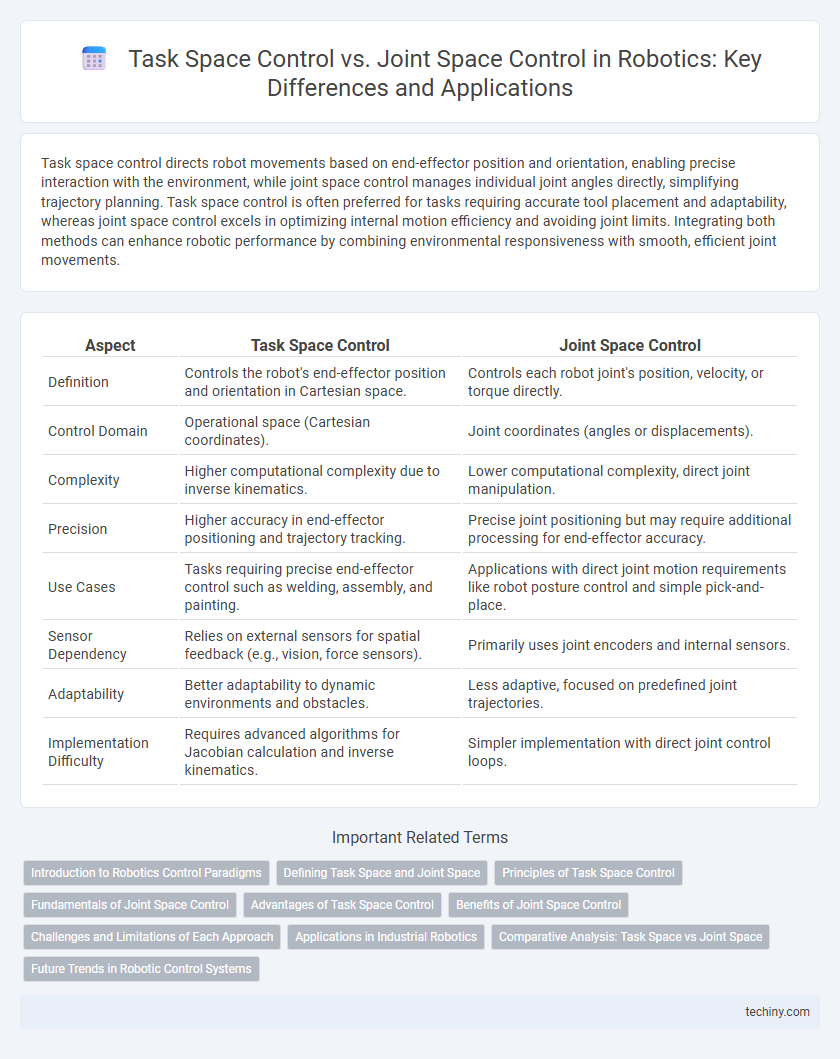
| Aspect | Task Space Control | Joint Space Control |
|---|---|---|
| Definition | Controls the robot's end-effector position and orientation in Cartesian space. | Controls each robot joint's position, velocity, or torque directly. |
| Control Domain | Operational space (Cartesian coordinates). | Joint coordinates (angles or displacements). |
| Complexity | Higher computational complexity due to inverse kinematics. | Lower computational complexity, direct joint manipulation. |
| Precision | Higher accuracy in end-effector positioning and trajectory tracking. | Precise joint positioning but may require additional processing for end-effector accuracy. |
| Use Cases | Tasks requiring precise end-effector control such as welding, assembly, and painting. | Applications with direct joint motion requirements like robot posture control and simple pick-and-place. |
| Sensor Dependency | Relies on external sensors for spatial feedback (e.g., vision, force sensors). | Primarily uses joint encoders and internal sensors. |
| Adaptability | Better adaptability to dynamic environments and obstacles. | Less adaptive, focused on predefined joint trajectories. |
| Implementation Difficulty | Requires advanced algorithms for Jacobian calculation and inverse kinematics. | Simpler implementation with direct joint control loops. |
Introduction to Robotics Control Paradigms
Task space control directly manages the robot's end-effector position and orientation in the Cartesian coordinate system, enabling precise manipulation in the workspace. Joint space control operates by commanding individual joint angles or velocities, focusing on the robot's kinematic chain and ensuring smooth trajectory tracking through joint movements. Both paradigms are fundamental in robotics control, with task space control optimizing interaction with the environment and joint space control providing stability and simplicity in low-level motor commands.
Defining Task Space and Joint Space
Task space refers to the robot's operational environment described by the position and orientation of its end-effector in Cartesian coordinates, capturing the direct interaction with objects or the workspace. Joint space represents the robot's configuration defined by the angles or displacements of each joint, detailing the internal mechanical state controlling movement. Effective robotic control requires transforming task space commands into joint space actions to achieve precise and adaptive manipulation.
Principles of Task Space Control
Task space control focuses on directly managing the robot's end-effector position and orientation in the operational workspace, enabling precise interaction with the environment. It relies on kinematic and dynamic models to map desired trajectories in Cartesian coordinates into joint commands, ensuring accurate path tracking and force regulation. This approach is essential for complex manipulation tasks requiring real-time adaptation to external forces and obstacle avoidance.
Fundamentals of Joint Space Control
Joint space control in robotics refers to managing the motion of each robot joint independently by directly controlling joint angles and velocities to achieve desired robot configurations. It relies on precise kinematic and dynamic models to compute joint commands, enabling accurate trajectory tracking and stable robotic manipulation. This method simplifies the control problem by focusing on actuator space, making it fundamental for robots with complex kinematics or redundant degrees of freedom.
Advantages of Task Space Control
Task space control enables robots to operate directly in the Cartesian coordinate system, allowing more intuitive and precise manipulation of objects in 3D space. It simplifies trajectory planning by focusing on the end-effector's position and orientation rather than individual joint angles, improving adaptability to dynamic environments. This approach enhances interaction with complex tasks like assembly, welding, and surgery by aligning robot movements with task-specific spatial requirements.
Benefits of Joint Space Control
Joint space control offers precise manipulation of individual robotic joints, enabling smoother and more accurate trajectory tracking in complex tasks. It enhances real-time responsiveness by directly managing joint angles, which improves stability and reduces computational overhead compared to task space control. This method is particularly beneficial in applications requiring fine motor skills, such as industrial automation and surgical robotics.
Challenges and Limitations of Each Approach
Task space control faces challenges in accurately mapping complex environment interactions to robot end-effector movements, leading to computational complexity and potential instability in dynamic environments. Joint space control struggles with limitations in precision and adaptability, as controlling each joint individually can impede smooth coordination and responsiveness to unexpected external forces. Both approaches must address issues of real-time feedback integration and robustness under varying operational conditions to enhance robotic performance.
Applications in Industrial Robotics
Task space control optimizes robotic manipulator movements by focusing on the end-effector's position and orientation, enhancing precision in assembly, welding, and material handling applications. Joint space control regulates individual joint angles to achieve desired configurations, offering stability and simplicity for pick-and-place and palletizing tasks. Industrial robotics leverages task space control for complex, adaptive operations and joint space control for repetitive, high-speed functions to maximize efficiency and accuracy.
Comparative Analysis: Task Space vs Joint Space
Task space control directly manages end-effector positions and orientations, enabling precise interaction with the environment, while joint space control focuses on the manipulation of individual joint angles for trajectory planning. Task space control offers intuitive handling of complex tasks by utilizing Cartesian coordinates, enhancing accuracy in dynamic and unstructured environments. Joint space control provides stability and simplicity in robot motion control, making it effective for well-defined paths but less adaptable to real-time task variations compared to task space control.
Future Trends in Robotic Control Systems
Future trends in robotic control systems emphasize the integration of task space control with advanced machine learning algorithms, enabling robots to perform complex manipulations with higher precision and adaptability. Research is shifting towards hybrid control architectures that leverage real-time sensory feedback in both task space and joint space, improving autonomy and responsiveness in dynamic environments. The development of AI-driven predictive models enhances the ability of robots to anticipate and adjust movements, marking a significant advancement over traditional joint space control methods.
Task space control vs Joint space control Infographic