Underactuated robots have fewer actuators than degrees of freedom, enabling simpler designs and lower energy consumption while relying on passive dynamics for movement. Overactuated robots possess more actuators than necessary, providing enhanced control, redundancy, and the ability to perform complex tasks with higher precision. Selecting between underactuated and overactuated robots depends on the trade-off between mechanical complexity, control sophistication, and desired performance.
Table of Comparison
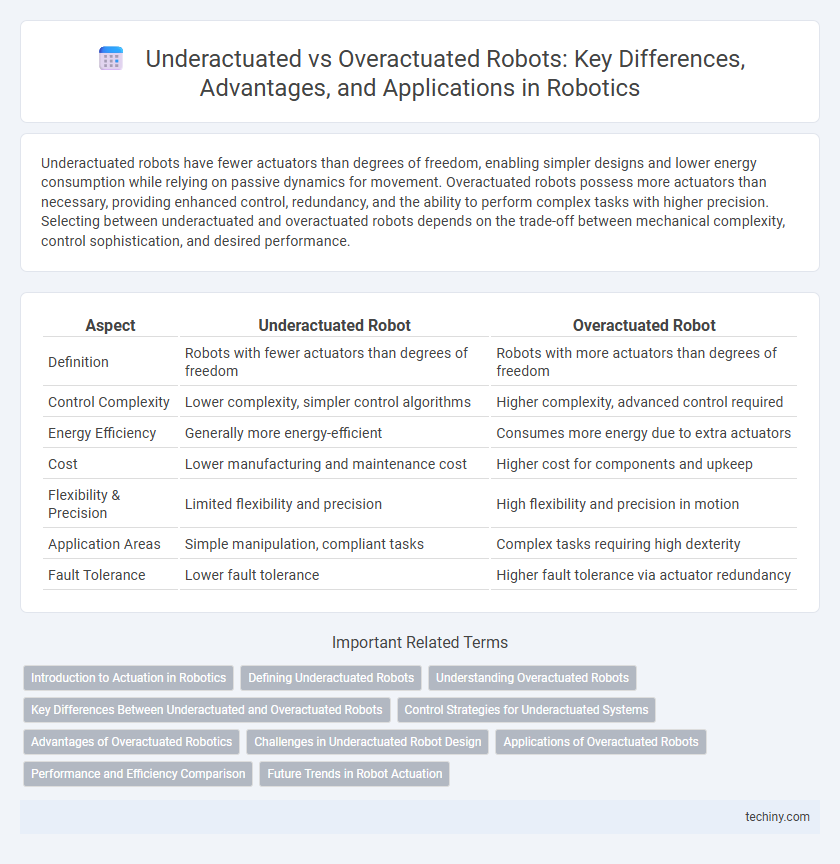
| Aspect | Underactuated Robot | Overactuated Robot |
|---|---|---|
| Definition | Robots with fewer actuators than degrees of freedom | Robots with more actuators than degrees of freedom |
| Control Complexity | Lower complexity, simpler control algorithms | Higher complexity, advanced control required |
| Energy Efficiency | Generally more energy-efficient | Consumes more energy due to extra actuators |
| Cost | Lower manufacturing and maintenance cost | Higher cost for components and upkeep |
| Flexibility & Precision | Limited flexibility and precision | High flexibility and precision in motion |
| Application Areas | Simple manipulation, compliant tasks | Complex tasks requiring high dexterity |
| Fault Tolerance | Lower fault tolerance | Higher fault tolerance via actuator redundancy |
Introduction to Actuation in Robotics
Underactuated robots have fewer actuators than degrees of freedom, resulting in reduced control complexity and lower energy consumption, but often at the cost of limited maneuverability or precision. Overactuated robots possess more actuators than necessary, enabling enhanced redundancy, fault-tolerance, and improved dexterity, ideal for complex tasks requiring high adaptability. Actuation in robotics defines how force and motion are generated and controlled, making the choice between underactuated and overactuated systems crucial for optimizing performance and efficiency.
Defining Underactuated Robots
Underactuated robots possess fewer actuators than degrees of freedom, resulting in passive or unactuated joints controlled through mechanical linkages or dynamic coupling. This design reduces weight, cost, and complexity while enabling adaptive behavior in unstructured environments. Common examples include compliant robotic fingers and flexible walking robots that leverage natural dynamics for efficient movement.
Understanding Overactuated Robots
Overactuated robots feature more actuators than the degrees of freedom, enabling enhanced control precision and fault tolerance in complex tasks. This redundancy allows for optimized force distribution, improved dexterity, and greater adaptability to dynamic environments compared to underactuated systems. Engineers leverage this surplus of actuators to achieve finer manipulation, increased reliability, and robustness in applications such as robotic arms and humanoid robots.
Key Differences Between Underactuated and Overactuated Robots
Underactuated robots have fewer actuators than degrees of freedom, relying on passive dynamics to achieve motion, which results in simpler hardware and lower energy consumption. Overactuated robots possess more actuators than necessary, enabling enhanced control, redundancy, and fault tolerance but increasing system complexity and cost. The key differences lie in control complexity, mechanical design, and adaptability to dynamic environments.
Control Strategies for Underactuated Systems
Control strategies for underactuated robots emphasize exploiting passive dynamics and nonlinear control techniques such as feedback linearization, backstepping, and sliding mode control to achieve stability and precise motion despite fewer actuators than degrees of freedom. Energy-shaping methods and trajectory optimization also play a crucial role in managing underactuated systems by tailoring control inputs to leverage natural system dynamics. Model predictive control (MPC) and adaptive control frameworks enhance robustness and performance, enabling underactuated robots to perform complex tasks with reduced actuation.
Advantages of Overactuated Robotics
Overactuated robots possess multiple actuators controlling a single degree of freedom, enabling superior fault tolerance and enhanced control precision. This redundancy allows for adaptive behavior in dynamic environments and improved load distribution, resulting in increased reliability and performance. Such systems excel in complex tasks requiring high dexterity and robustness, surpassing the capabilities of underactuated robots.
Challenges in Underactuated Robot Design
Underactuated robot design faces significant challenges due to limited control inputs relative to the degrees of freedom, making precise movement and stability difficult to achieve. Complex nonlinear dynamics and constraints require advanced control algorithms, such as feedback linearization and adaptive control, to ensure effective operation. Balancing energy efficiency while maintaining functionality further complicates the design of underactuated robotic systems.
Applications of Overactuated Robots
Overactuated robots, equipped with more actuators than degrees of freedom, excel in applications requiring enhanced dexterity, redundancy, and fault tolerance, such as aerospace systems, advanced prosthetics, and autonomous underwater vehicles. Their redundant actuators enable precise control even under actuator failures or external disturbances, making them ideal for complex environments and critical missions. This overactuation supports sophisticated manipulation tasks, adaptive locomotion, and improved robustness in harsh or unpredictable conditions.
Performance and Efficiency Comparison
Underactuated robots feature fewer actuators than degrees of freedom, resulting in simpler designs that enhance energy efficiency and reduce cost but limit precise control and adaptability. Overactuated robots incorporate more actuators than necessary, providing superior performance through enhanced dexterity, fault tolerance, and control precision, albeit with increased complexity and power consumption. Performance metrics such as speed, accuracy, and robustness often favor overactuated systems, while underactuated counterparts excel in efficiency and operational simplicity.
Future Trends in Robot Actuation
Future trends in robot actuation emphasize the growing adoption of underactuated robots due to their energy efficiency, reduced mechanical complexity, and enhanced adaptability in unstructured environments. Overactuated robots remain crucial in applications requiring high precision and redundancy, utilizing advanced control algorithms and sensor fusion to optimize performance. Innovations in soft robotics, variable stiffness actuators, and artificial muscles are driving hybrid actuation systems, blending underactuation and overactuation benefits for versatile, responsive robotic platforms.
Underactuated robot vs Overactuated robot Infographic